
(株)イーケイジャパンから販売されているプログラミングロボット教材「プログラミングフォロ」のレビュー記事です。
私は機械系のエンジニアでプログラミングに関する知識がなく、プログラミングについて学習してしたいと思ったため購入しました。
本記事ではプログラミングフォロがどんな商品なのか、組立の様子や最初から転送してある動作確認用プログラムの動作、そしてプログラム方法までを詳しくご紹介します。

- プログラミング学習ロボット「プログラミングフォロ」の概要、評価
- 組立時の具体的な注意点
- 内蔵されている動作確認用プログラムの機能
- ビジュアルプログラミングの具体的な手順
- センサーを利用した応用プログラムの作成例
目次
プログラミングフォロってどんなロボット?
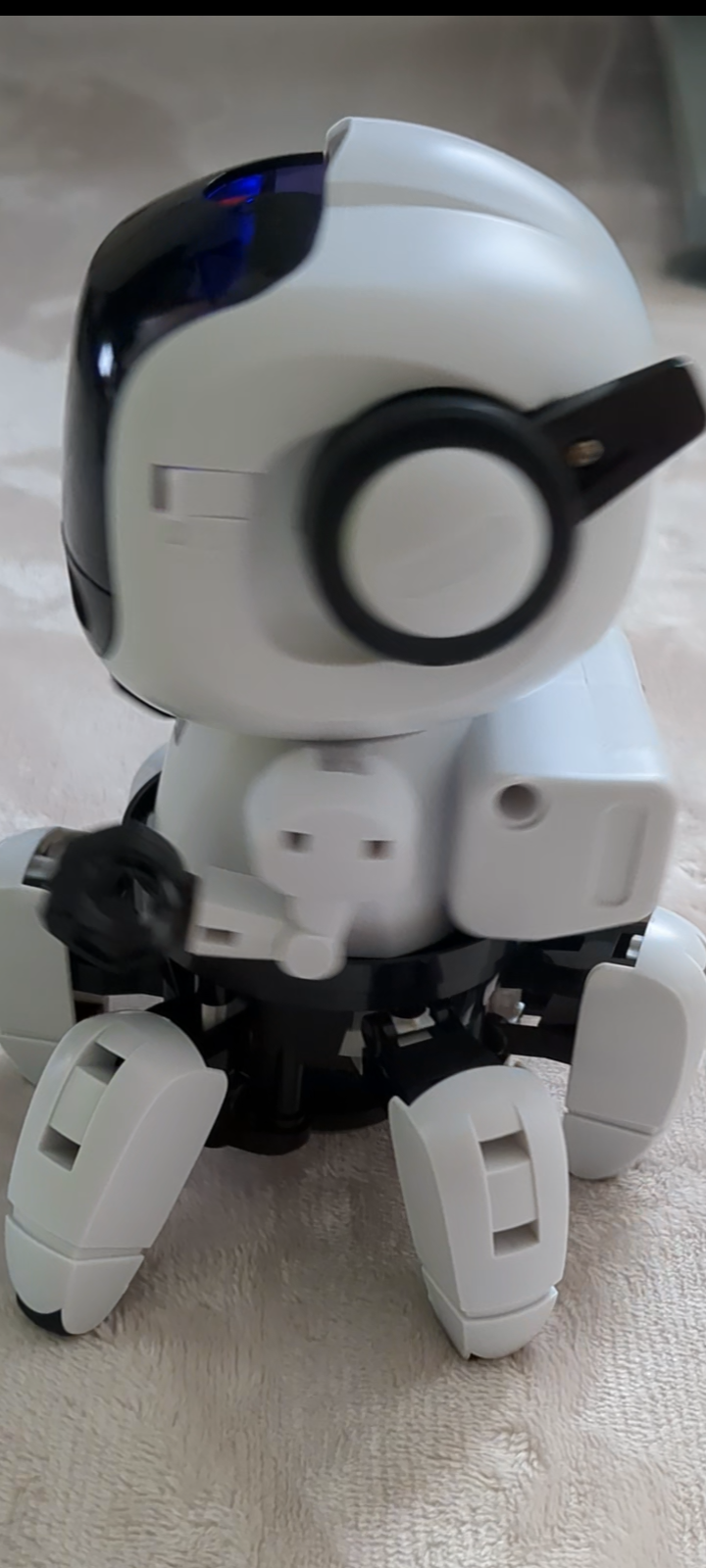
「プログラミングフォロ」は、6本足で歩く本格的なロボット教材です。
赤外線センサーやスピーカー、8×8のドットマトリックスLEDを搭載していて、プログラミング次第で自由自在に動かせるのが大きな魅力です。
組立式なので、ものづくりの楽しさも味わえます。
- 対象年齢:小学校高学年~大人まで
- 必要なもの:単4電池4本(別売)、パソコンやタブレット(プログラミング時)、ニッパー、ドライバー(No.1)、ハサミ
- バリエーション:PaletteIDE版、micro:bit版、CHROME版 など
※PaletteIDE版は既に生産完了されています。今後購入される際は、後継機種のCHROME版をご購入ください。

プログラミング環境やバージョンごとの違い
プログラミングフォロは、アイコンを並べるだけの簡単なビジュアルプログラミングから、本格的なテキストプログラミングまで対応しています。
私が購入したのは「PaletteIDE版」なので、”PaletteIDE”というプログラミングフォロ専用ソフトでプログラムを作成します。
| バージョン名 | 使用アプリ | 操作デバイス | 特徴 |
|---|---|---|---|
| micro:bit版 | Microsoft MakeCode | PC/タブレット/スマホ | ブロック&JavaScript両対応 |
| PaletteIDE版 | PaletteIDE | PC | アイコンを並べるだけで簡単 |
| CHROME版 | プログラミング・ポータル | PC/Chromebook | ブラウザで手軽に |
プログラミングフォロをいざ開封!中身をチェック
箱を開けるとプラスチックパーツがぎっしりと入っています。


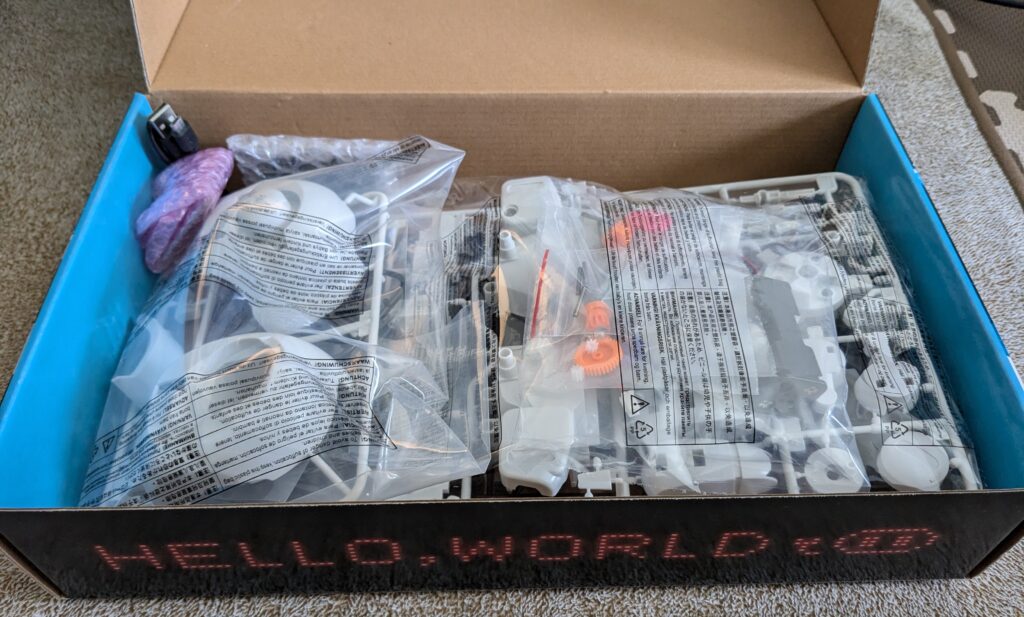
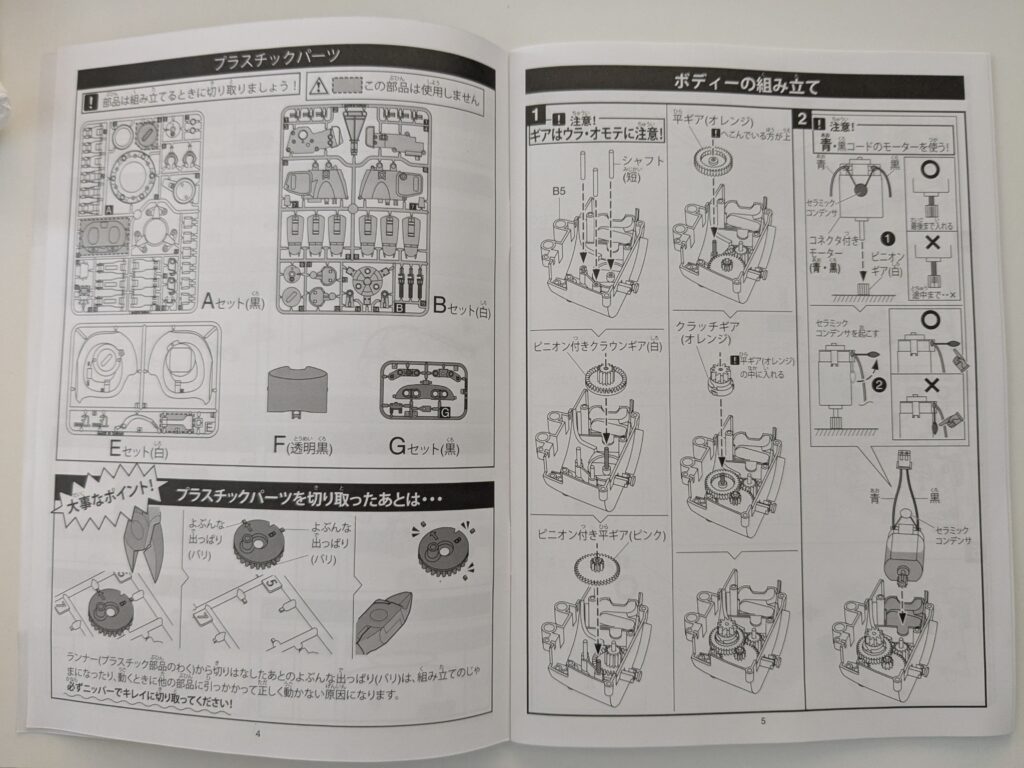
説明書はイラスト付きでとても分かりやすいです。
パーツはランナーに付いているので、プラモデルを作ったことがある人なら馴染みやすいはず。初めてでも説明書にパーツの切り離し方が丁寧に書いてあるので、迷うことはないと思います。
プログラミングフォロの組立までを評価
部品の切り離しに使用したツール
パーツをランナーから切り離すのにはニッパーを使用します。私はこちらのニッパーを使って組み立てました。軽く握っただけでランナーが楽々切れる切れ味の持ち主です。

ねじ締結箇所の注意事項
部品の結合にタッピングネジを使用している箇所があります。
No.1の+ドライバーでねじを締めましょう。ねじ頭の形状に合わないドライバーでねじ締めをすると、ねじ頭が潰れてしまう恐れがあります。ねじ頭が潰れると、ねじを締めたり緩めたりすることができなくなってしまいます。
使用するドライバーは、先端に磁力が付いているタイプがオススメです。ねじがドライバーに引っ付くため、ねじ締めが行いやすくなります。

ねじは真っすぐ締めましょう。タッピングネジは部品にねじを切りながら締めるねじなのですが、部品の肉厚が薄いところがあり、変に力が加わると割れてしまうので注意が必要です。
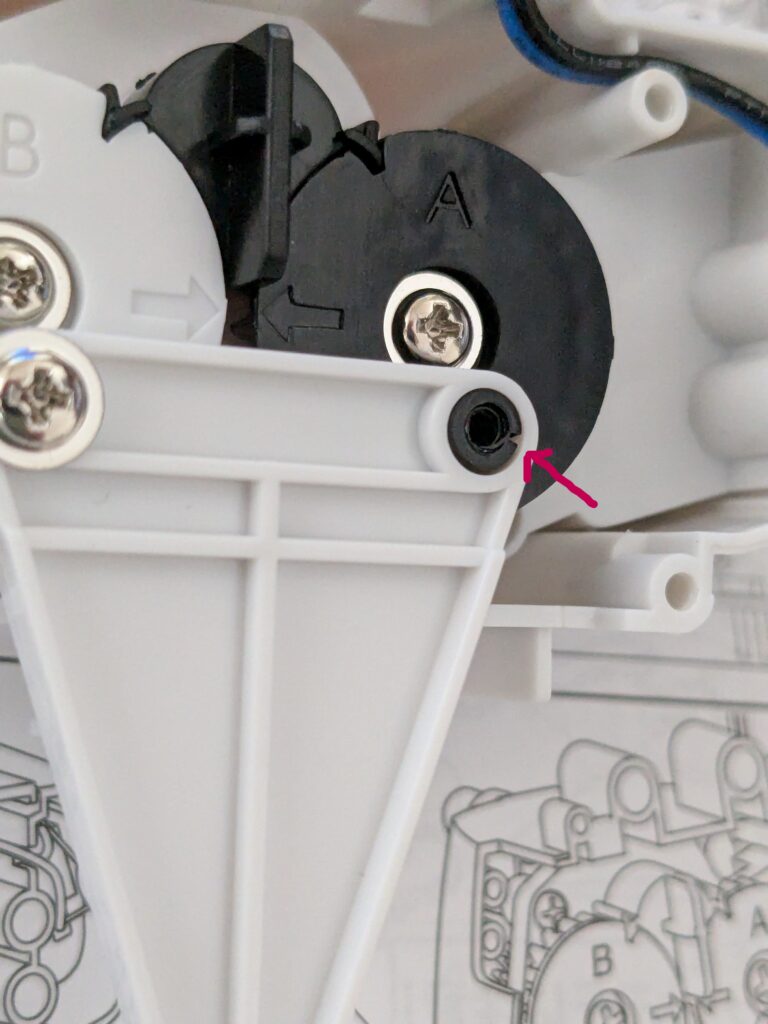
幸い動作に影響はなかったですが、ねじを締める際は慎重に行いましょう。
組立の様子
組立の流れを写真で紹介します。私の場合で、作業時間は2時間ぐらいかかりました。
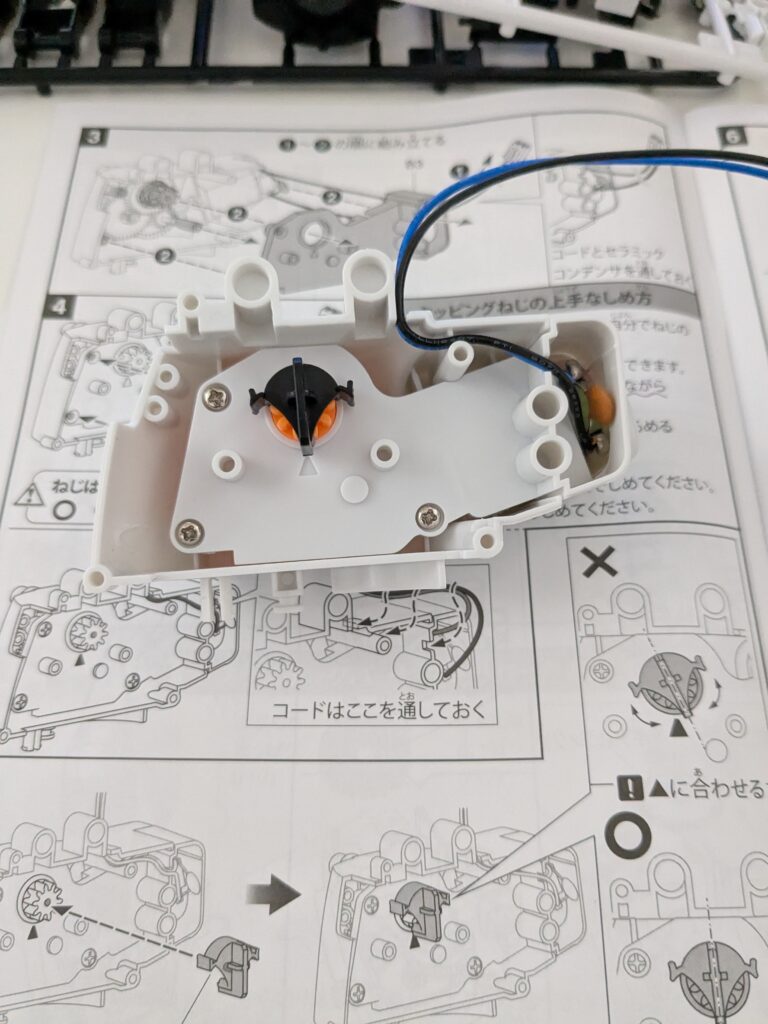
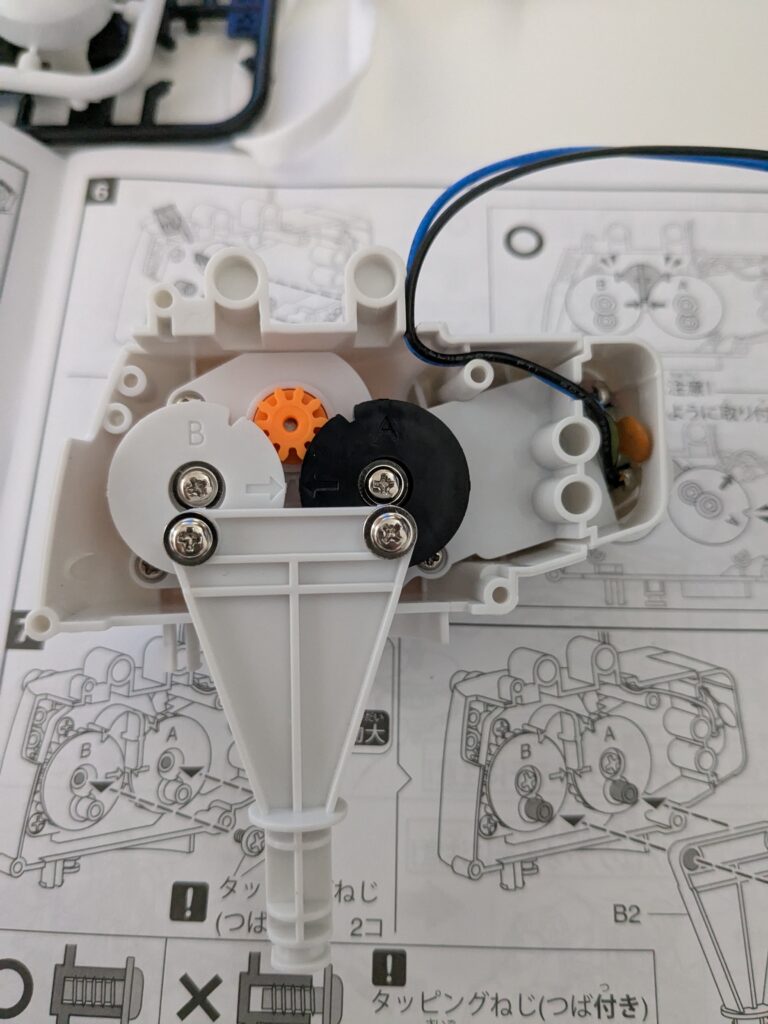
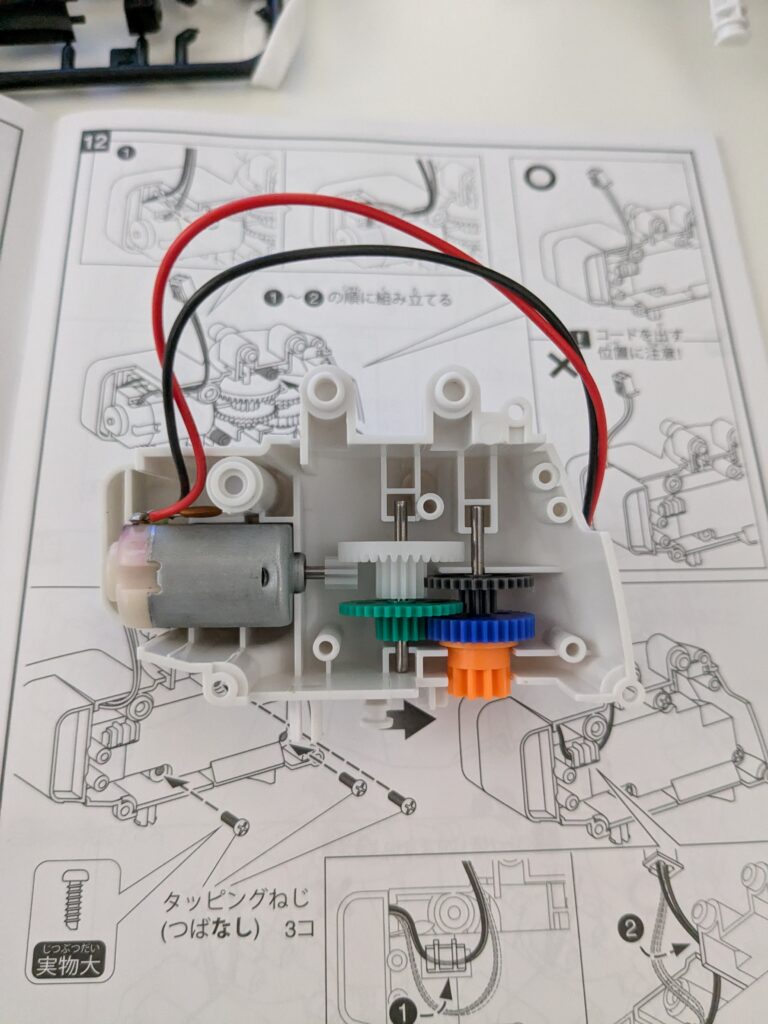
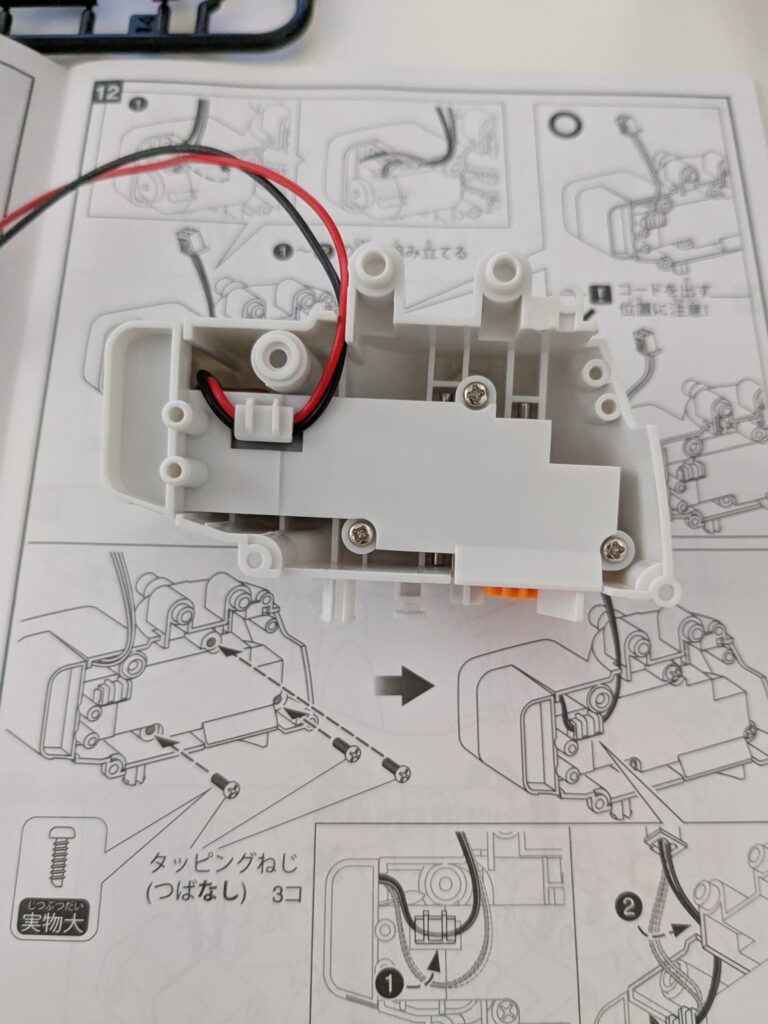
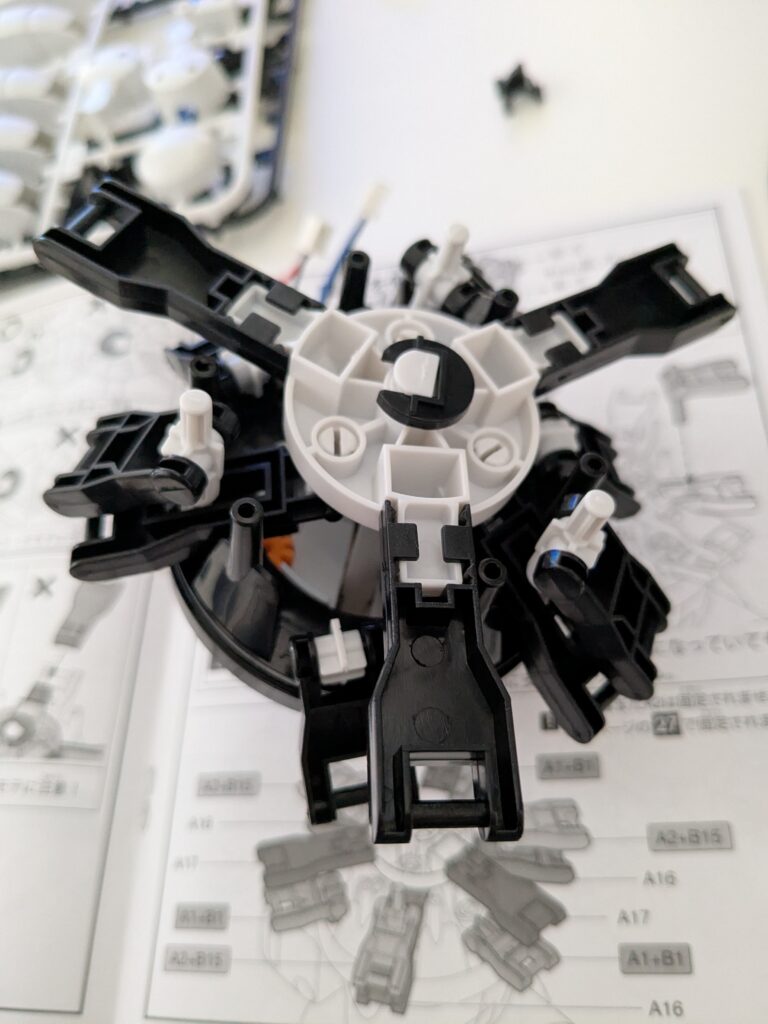
ギアボックス組立
ギアの組み合わせを間違えると動かなくなったり壊れる原因になります。ギアごとに色分けがされており、組み合わせを間違えにくくしてあるのは親切だと感じました。
胴体+6本足の組立
同じような部品が出てくるので、向きや種類を間違えないようにしましょう。部品のはめ込みに力が必要なところがあるので、部品を割らないように注意が必要です。予備はないので、慎重に組みましょう。
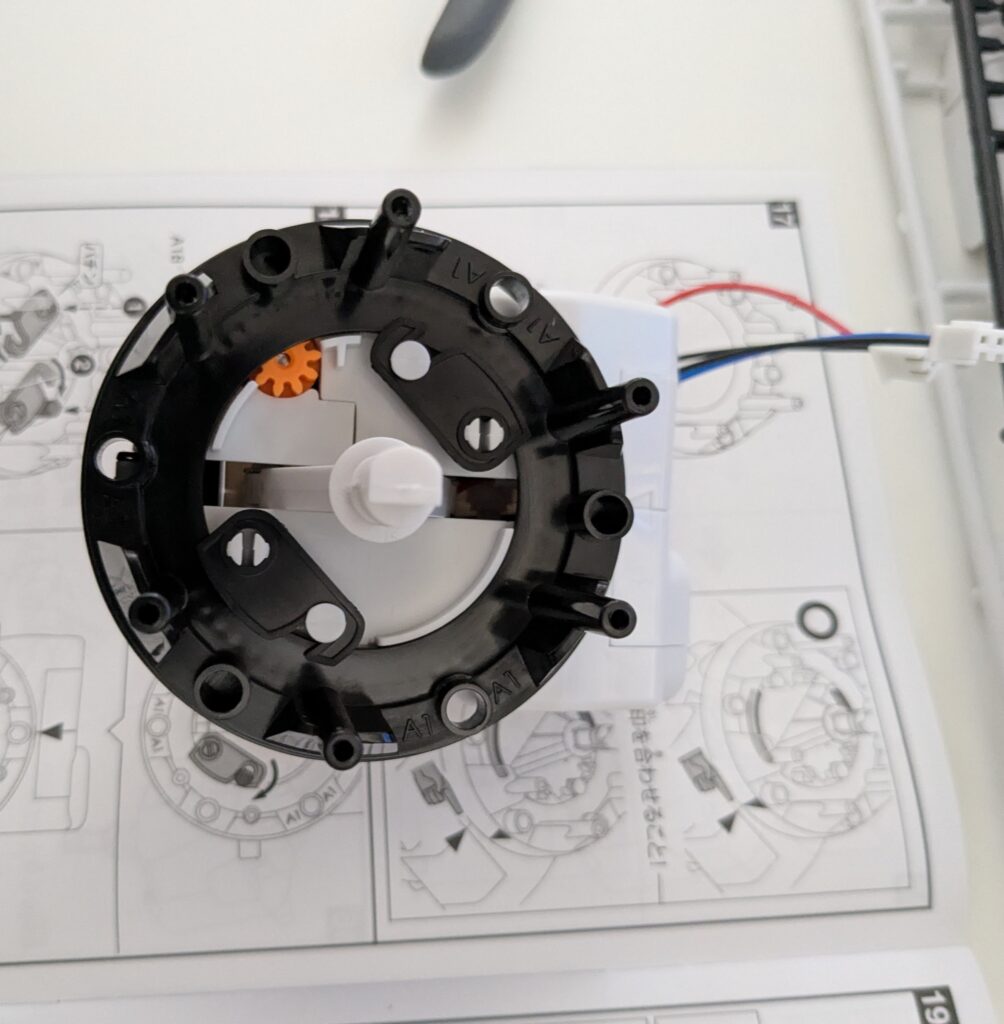
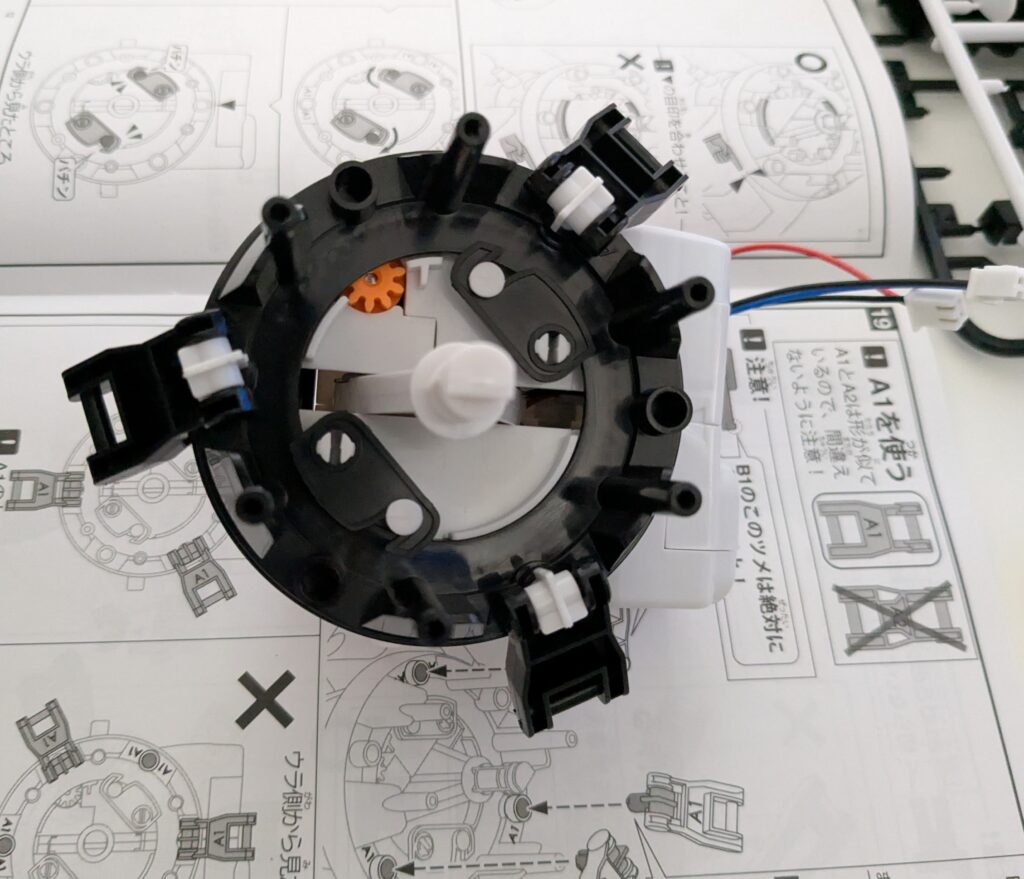
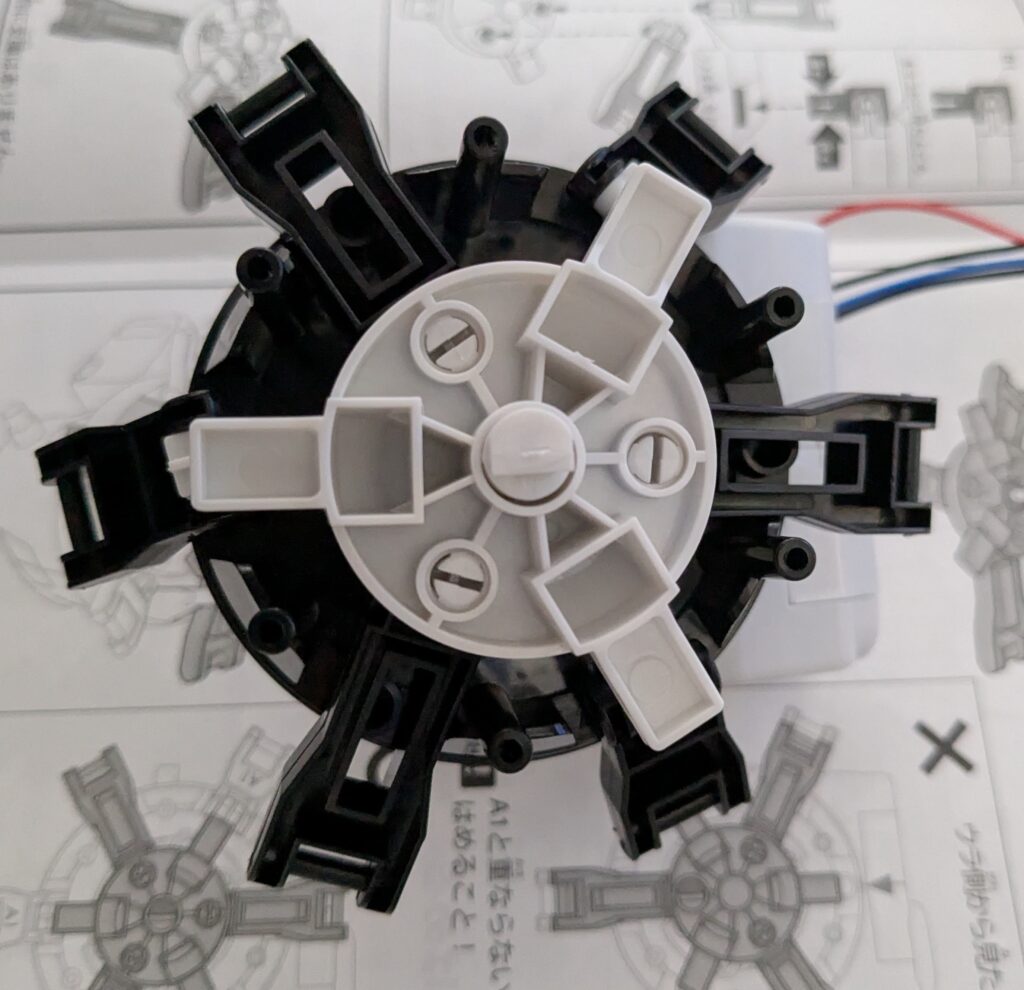
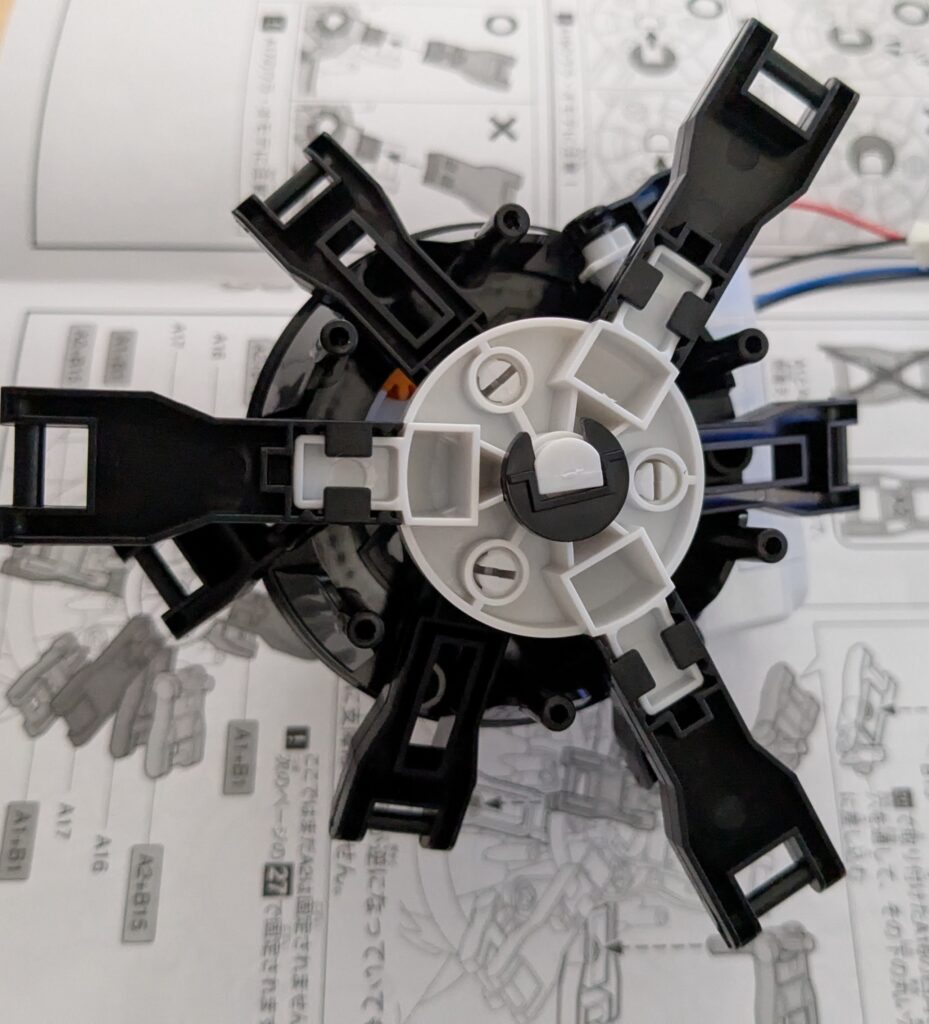
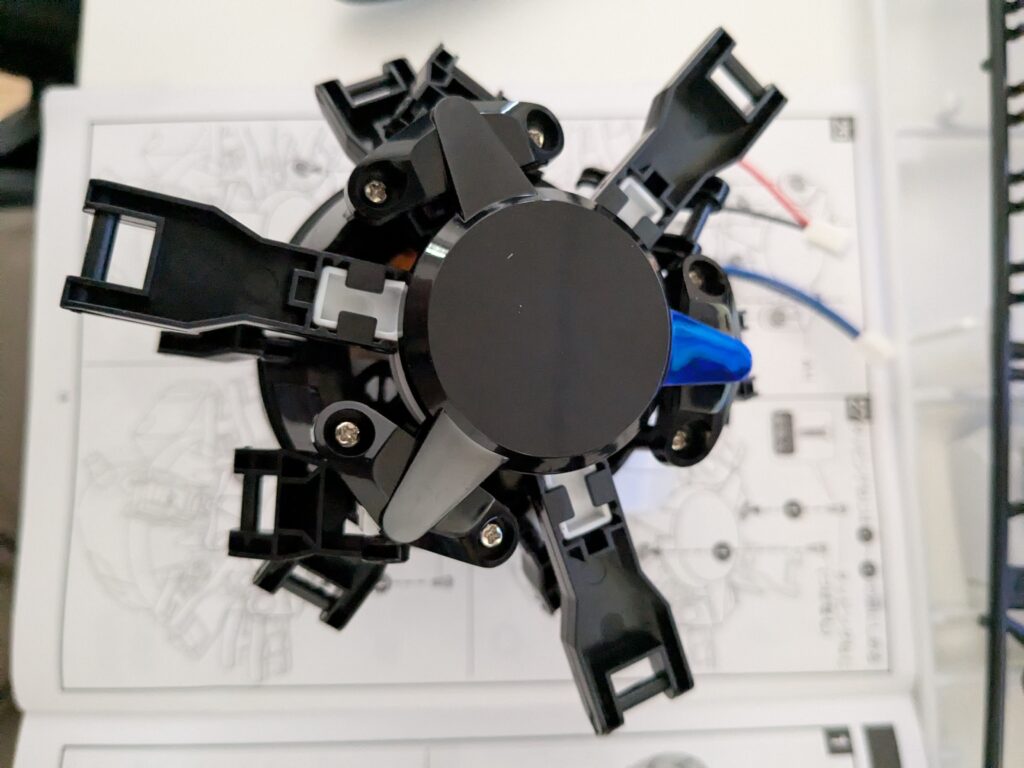
1つのモーターで6本脚を動かすリンク構造になっており、構造の勉強になります。
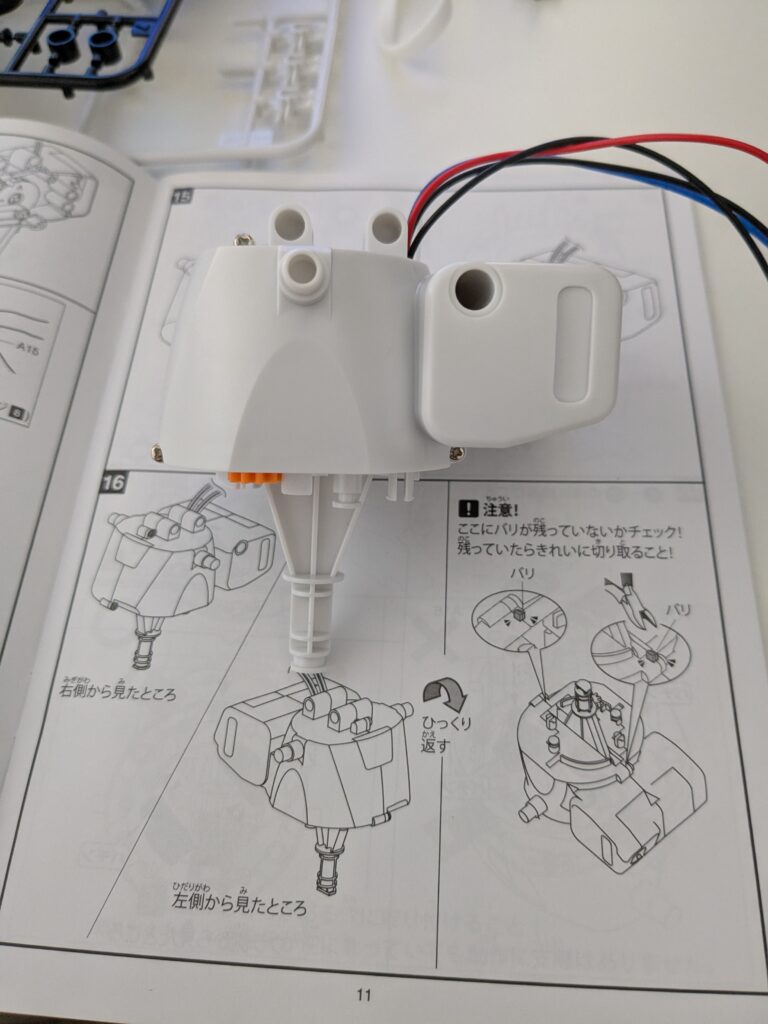
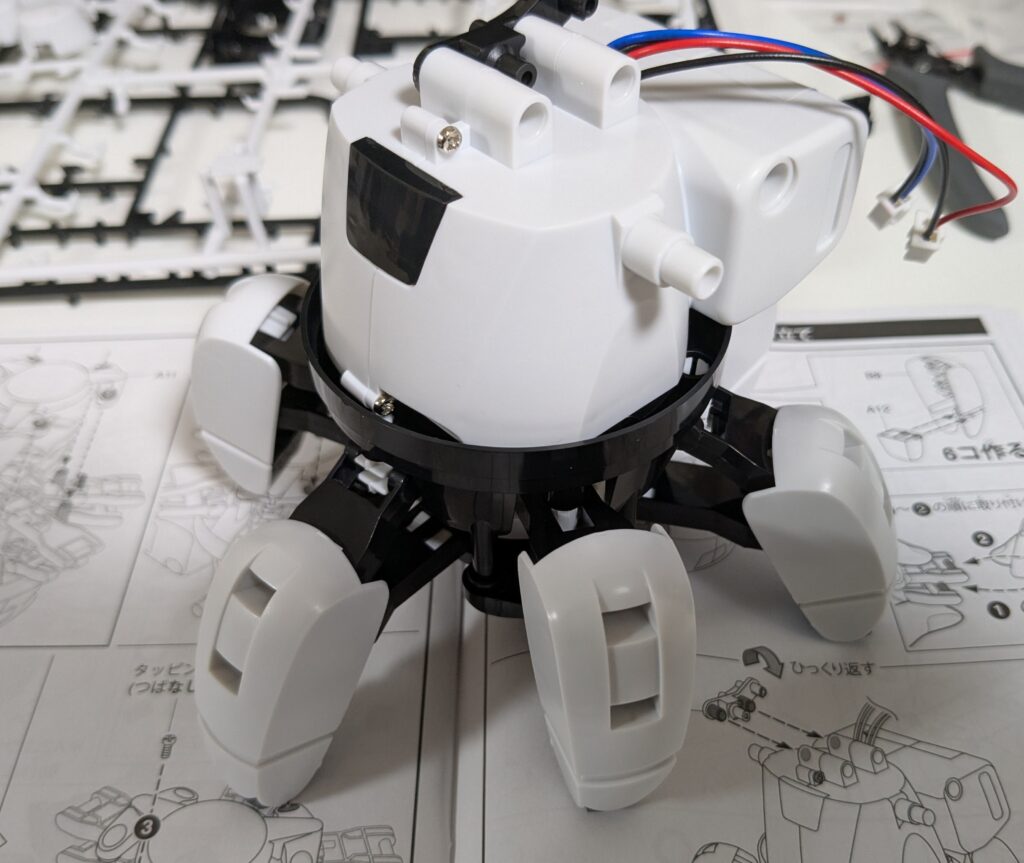
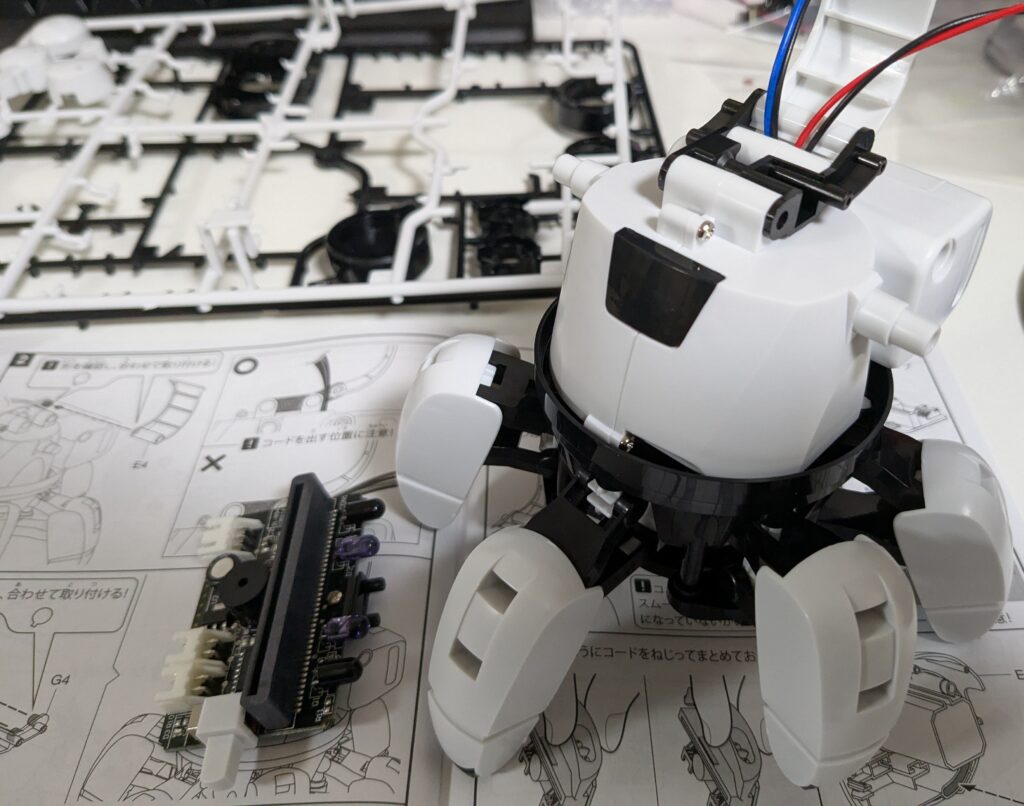
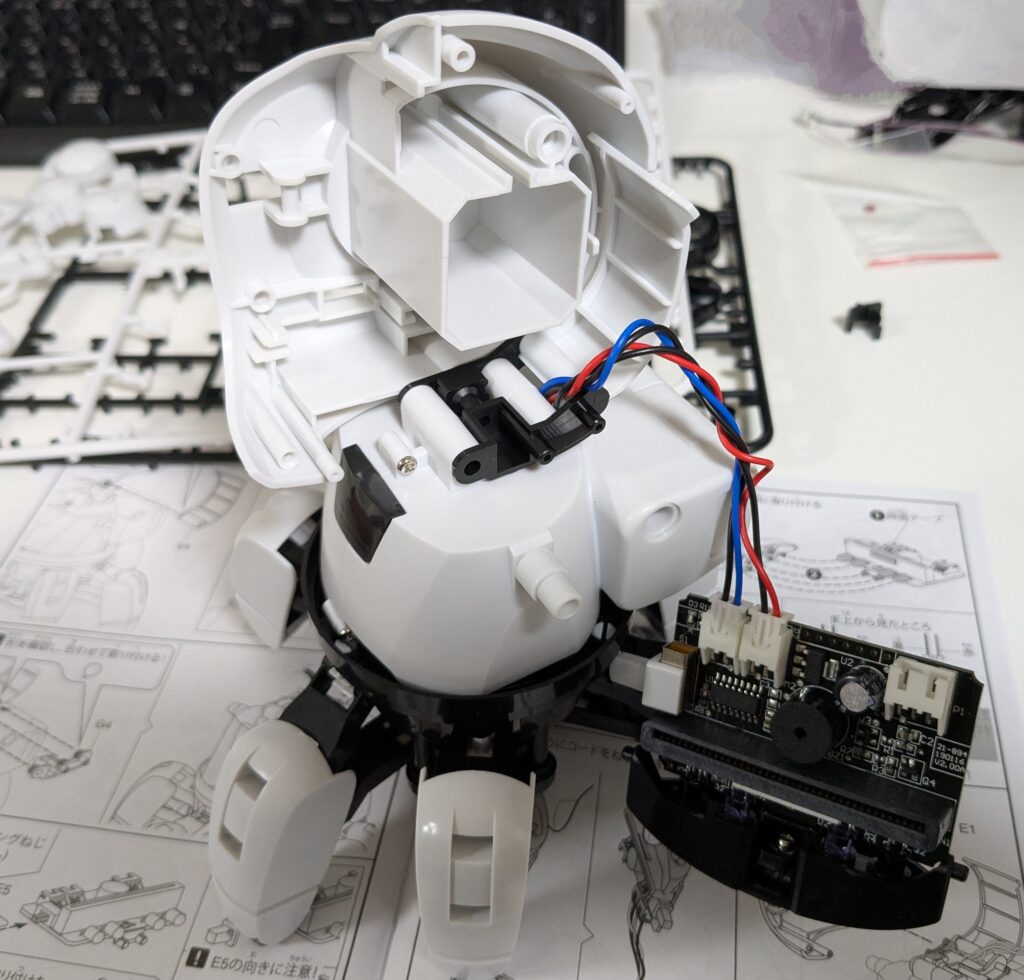
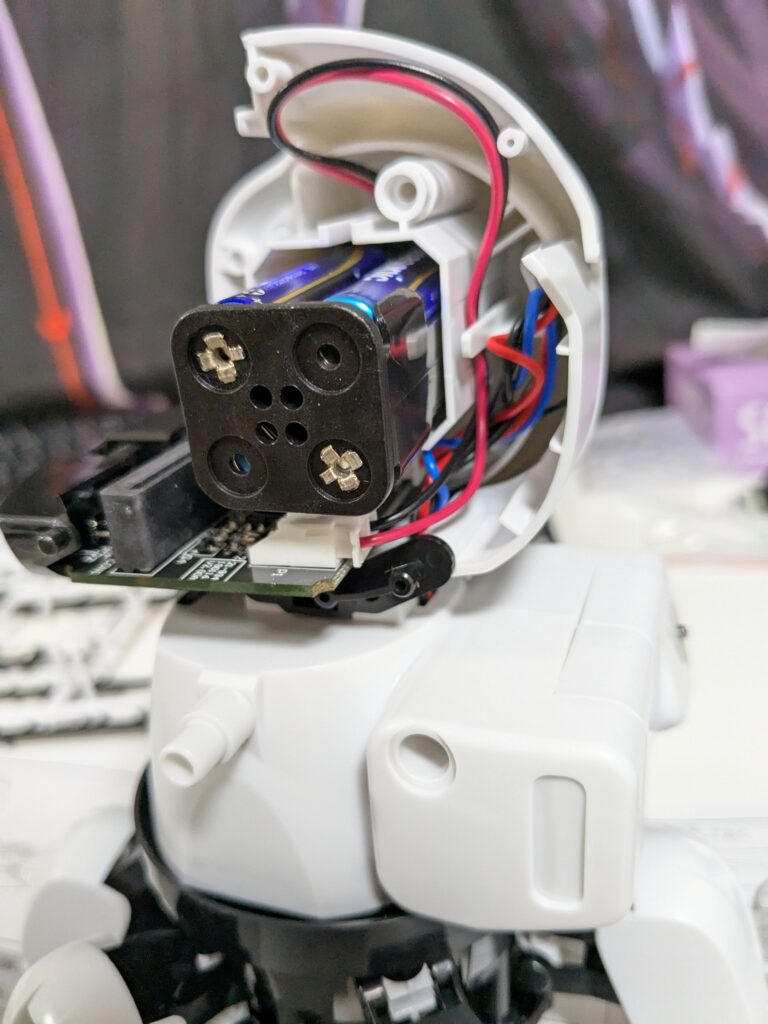
頭部組立~完成まで
電池ボックスや基板の取り付けを行います。




動作確認用プログラムで動作確認
プログラミングフォロには、あらかじめ動作確認用プログラムが転送されているので、そちらを使って動作確認を行います。
探索モード
赤外線センサーで障害物を検知し、回避しながら前進します。前方に障害物がない限り、前進し続けます。チョコチョコ動いて可愛いですが、移動時の音が結構します。具体的な説明ができなくて恐縮ですが、寝てるときに動かしたら、音で目が覚めるぐらいの音量はあると思います。
追跡モード
赤外線センサーで前方に物体を検知すると、物体の方に向かって前進します。前方に物体がないとき(赤外線センサーが反応していない)ときは停止します。
組立までの評価
組立までの良かった点と悪かった点を以下にまとめます。
- 1つのモーターで6本脚を動かすリンク構造が勉強になる
- 説明書が丁寧
- 動きが可愛い
- 組み立てたらすぐに動かせる
- 破損するリスクがある部品の予備が同封されていない(別売)
- 移動時の音がうるさい(感覚によるところなので、人によりけり)
- 電池の交換が手間
プログラミングフォロのプログラミングまでを評価
プログラム作成の流れ
事前準備
説明書に記載してあるURLからPaletteIDEをインストールしておきます。
PaletteIDEを起動
PaletteIDEを立ち上げ、フォロを付属のUSBケーブルでパソコンと接続します。
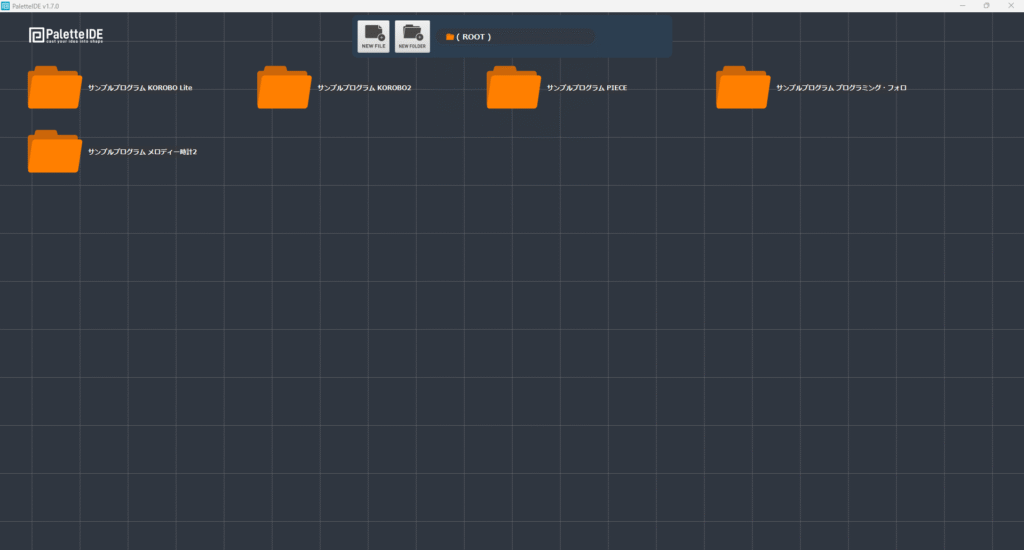
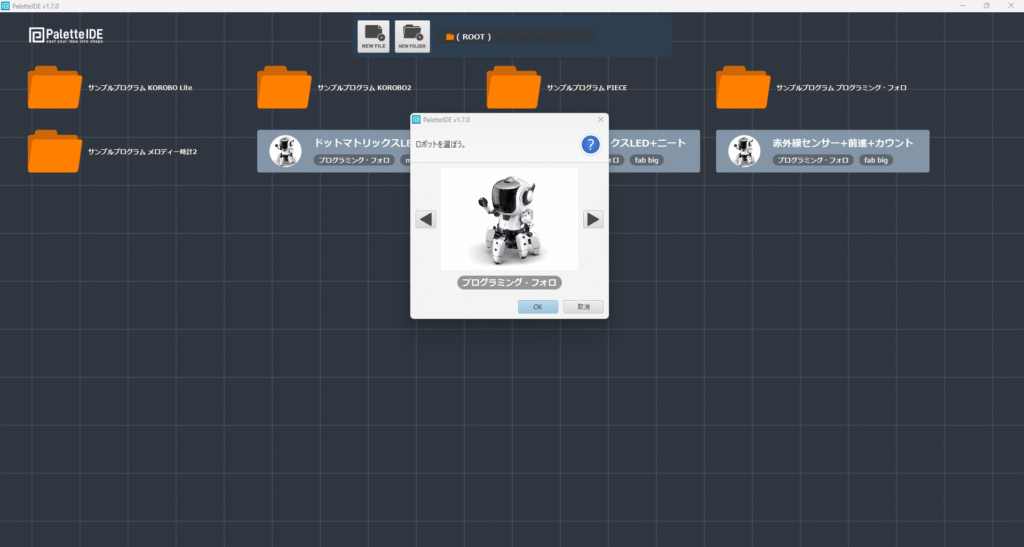
PaletteIDEを起動後、画面上部にある「NEW FILE」をクリックします。機体選択でプログラミングフォロを選択します。
プログラムの名前や作成者を入力します。
プログラム作成
PaletteIDEのプログラミング画面です。
コードを入力する必要はなく、画面下部にあるアイコンを組み合わせてプログラミングしていきます。条件分岐や繰り返しもアイコンを並べて簡単に設定可能です。
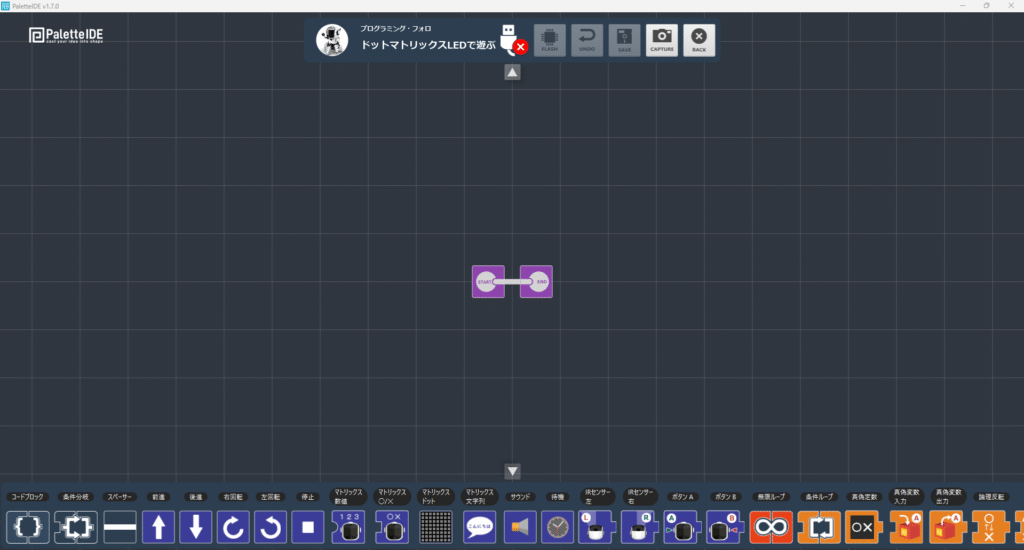
電子マニュアルで各アイコンの説明やプログラム方法が丁寧に説明されていました。アイコンのデザインは、アイコンの持つ機能が直感的にわかるようになっています。
プログラム転送
作成したプログラムを、画面上部にある「FLASH」ボタンでロボット本体に転送します。転送後はフォロの電源を切ってUSBケーブルを外します。
サンプルプログラム
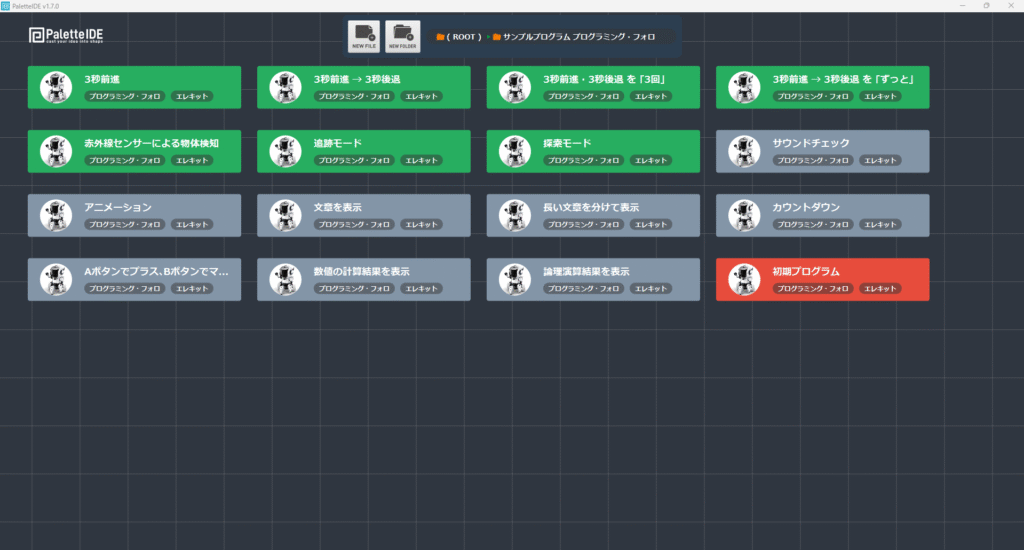
自分でプログラムを作成してフォロを動かすことができますが、16種類のサンプルプログラムが用意されているので、このサンプルプログラムをフォロに転送することで動かすこともできます。
例えば、フォロの顔の左右にあるボタンを押すことで数をカウントするプログラムや、簡単な計算結果を表示させるプログラムなどがあります。
前進・後退といったフォロ自体を動かすことだけでなく、ドットマトリックスLEDや赤外線センサーを使った動作をさせることもできます。
ドットマトリックスLEDを使ったプログラム
ドットマトリックスLEDを使ったプログラムを作成してみました。プログラム初心者の私でも、アイコンを並べるだけで簡単にプログラムが組めました。
ニッコリなフォロ
フォロに表情を付けてみました。
プログラミング画面上にあるドットマトリックスLEDアイコンの光らせたいところをクリックすることで、顔のようにすることができます。

ニートなフォロ
プログラムを起動すると「!」を表示し、「はたらきたくないでござる」という文字列を表示します。長い文字列でも、スクロールして表示することができます。

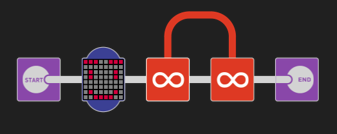
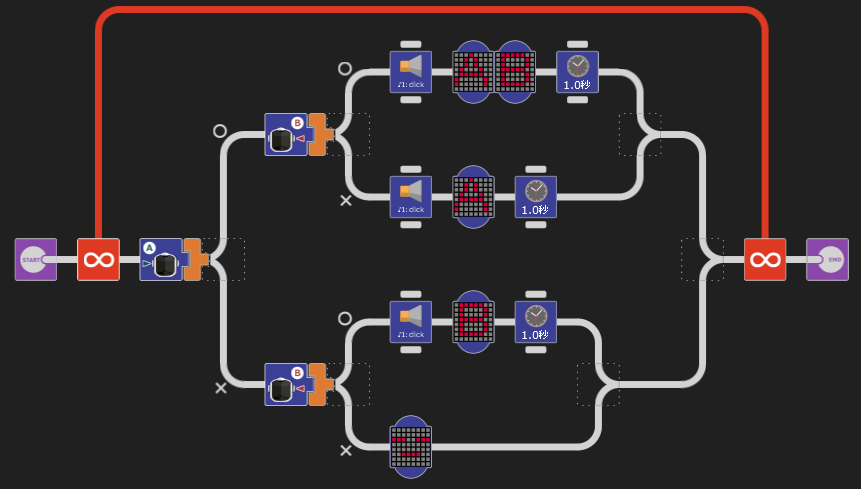
押したボタンで表示が変わる
フォロの顔左右に付いているボタンの押し方で表示が変わるプログラムです。
Aボタンを押したときは「A」、Bボタンを押したときは「B」、AとB両方のボタンを押したときは「AB」と表示します。
赤外線センサーを使ったプログラム
赤外線センサーを使ったプログラムにも挑戦してみました
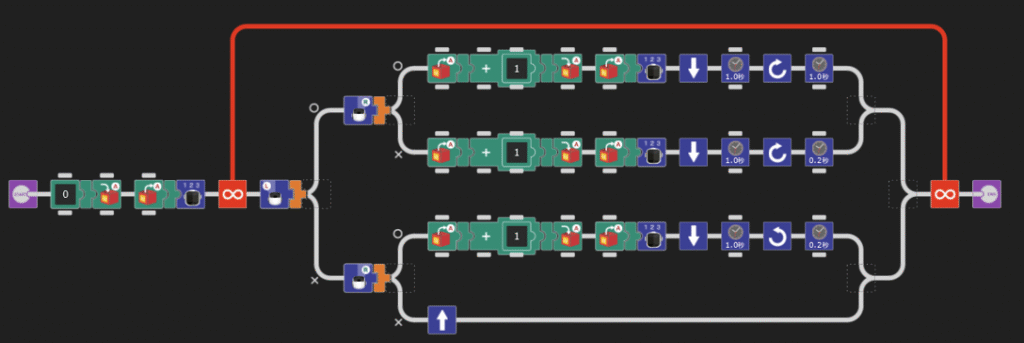
赤外線センサーで検知した回数をカウントしながら前進
初期プログラムにある探索モードを発展させました。
赤外線センサーで何も検知していないときは前進を続けます。左右にある赤外線センサーで検知したときは、検知した方向とは逆向きに前進を続けます。
赤外線センサーで検知するたびに回数をカウントし、検知した回数はドットマトリックスLEDに表示するようにプログラムを組んでいます。
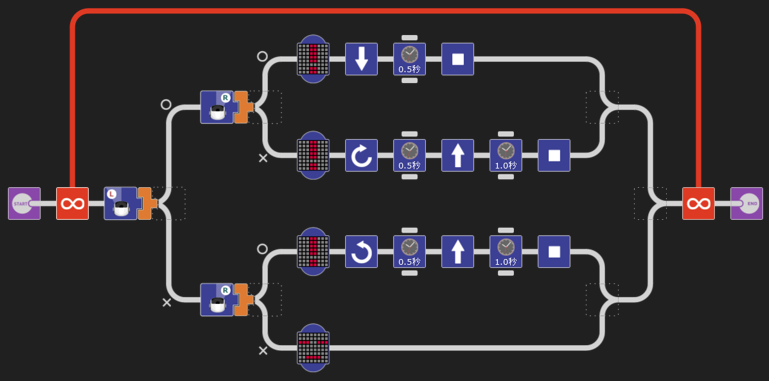
赤外線センサーに反応があると逃げる
動画が容量の関係でアップロードできなかったので、画像のコマ送りで紹介します。
赤外線センサーに反応がないときは、仏頂面で待機しています。物体を検知すると逃げていき、また仏頂面で待機します。



プログラミングまでの評価
プログラミングまでの良かった点と悪かった点を以下にまとめます。
- アイコンを並べるだけで簡単にプログラムが組めるため、初心者でもプログラミングを体験することができる
- サンプルプログラムが16種類と豊富
- アイコンのデザインが、アイコンの持つ機能が直感的にわかるようになっている
- プログラム転送の時間が数秒と短く、プログラムした動作をすぐに確認できる
- プログラミング言語を使ったプログラムの学習をしたい方には向かない
- PaletteIDEがプログラミングフォロの専用ソフトなので、他のことに活かせない
まとめ
プログラミングフォロは、本体の組み立てからプログラム作成、作成したプログラムの動作確認までを体験することができます。
遊びながら自然とプログラミング的思考が身につき、創造力も広がります。また、欲しい動作を実現させるためのプログラムを考えるので、考える力が身に付きます。
私個人の感想で、プログラミングの学習としては少し物足りなかったです。まったくプログラミングを知らない、触れたことがないという方にはオススメの教材だと感じました。


コメント