
(株)イーケイジャパンから販売されているプログラミングロボット教材「プログラミングフォロ」の【組立編】をお届けします。
私は機械系のエンジニアでプログラミングに関する知識がなく、プログラミングに触れてみたいなと思い購入しました。
プログラミング未経験の私でも楽しくプログラミングに触れることができました。
本記事ではプログラミングフォロがどんな商品なのか、そして組立の様子や、最初から転送してある動作確認用プログラムの動作について詳しくご紹介します。

プログラム編の記事を投稿しました。

目次
プログラミングフォロってどんなロボット?
「プログラミングフォロ」は、6本足で歩く本格的なロボット教材です。
赤外線センサーやスピーカー、8×8のドットマトリックスLEDを搭載していて、プログラミング次第で自由自在に動かせるのが大きな魅力です。
組立式なので、ものづくりの楽しさも味わえます。
- 対象年齢:小学校高学年~大人まで
- 必要なもの:単4電池4本(別売)、パソコンやタブレット(プログラミング時)、ニッパー、ドライバー(No.1)、ハサミ
- バリエーション:PaletteIDE版、micro:bit版、CHROME版 など
※PaletteIDE版は既に生産完了されています。今後購入される際は、後継機種のCHROME版を購入ください。(公式HPリンク)
いざ開封!中身をチェック
箱を開けるとプラスチックパーツがぎっしりと入っています。


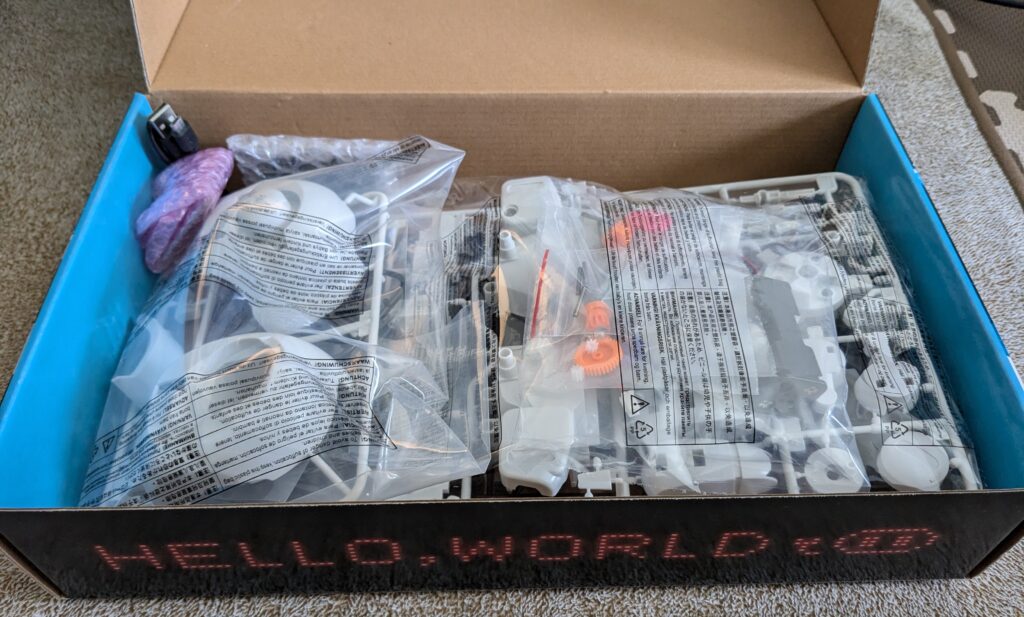
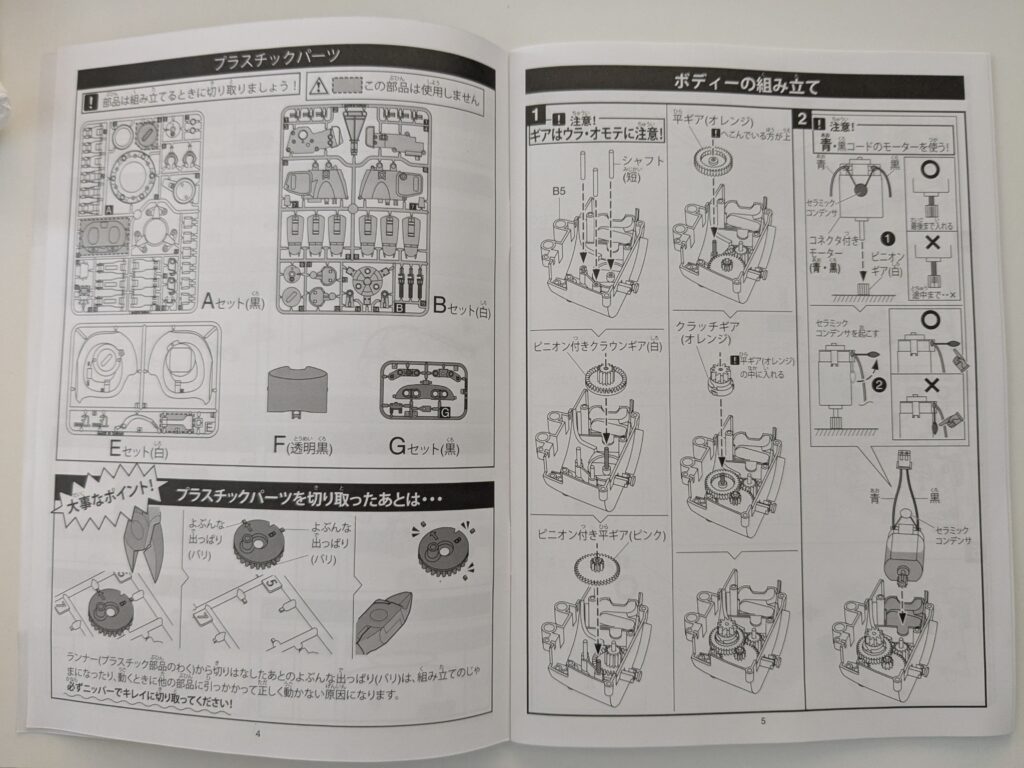
説明書はイラスト付きでとても分かりやすいです。
パーツはランナーに付いているので、プラモデルを作ったことがある人なら馴染みやすいはず。
初めてでも説明書にパーツの切り離し方が丁寧に書いてあるので、迷うことはないと思います。
組立
部品の切り離し
パーツをランナーから切り離すのにはニッパーを使用します。
私はこちらのニッパーを使って組み立てました。軽く握っただけでランナーが楽々切れる切れ味の持ち主です。小学生ぐらいの子供でも、力を入れずにランナーを切ることができます。

ねじ締結
部品の結合にタッピングネジを使用している箇所があります。
No.1の+ドライバーでねじを締めましょう。ねじ頭の形状に合わないドライバーでねじ締めをすると、ねじ頭が潰れてしまう恐れがあります。
ねじ頭が潰れると、ねじを締めたり緩めたりすることができなくなってしまいます。
使用するドライバーは、先端に磁力が付いているタイプがオススメです。ねじがドライバーに引っ付くため、ねじ締めが行いやすくなります。

作業の注意事項ですが、ねじは真っすぐ締めましょう。タッピングネジは部品にねじを切りながら締めるねじなのですが、部品の肉厚が薄いところがあり、変に力が加わると割れてしまうので注意が必要です。
組立の様子
組立の流れを写真で紹介します。
作業時間は2時間ぐらいかかりました。
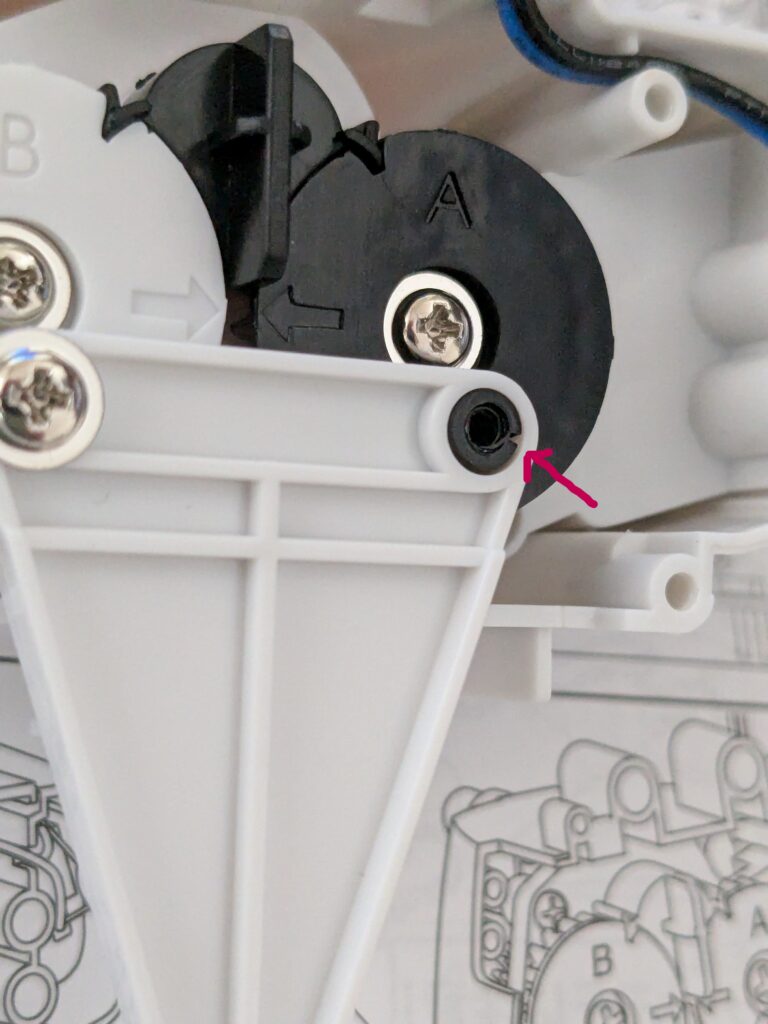
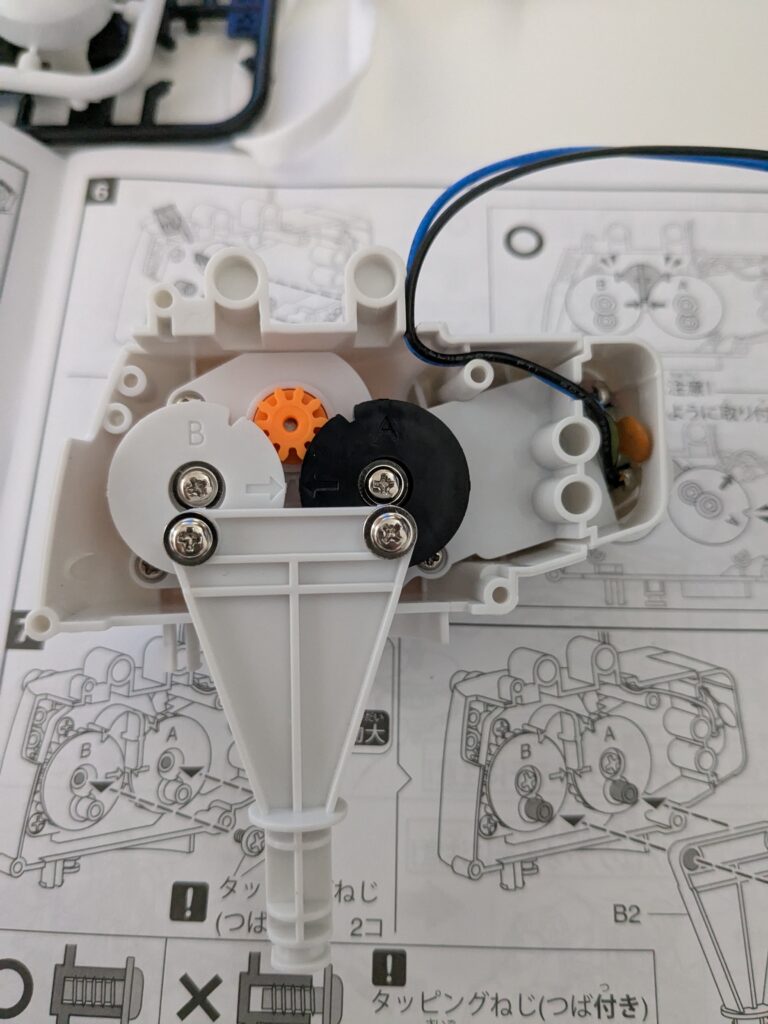
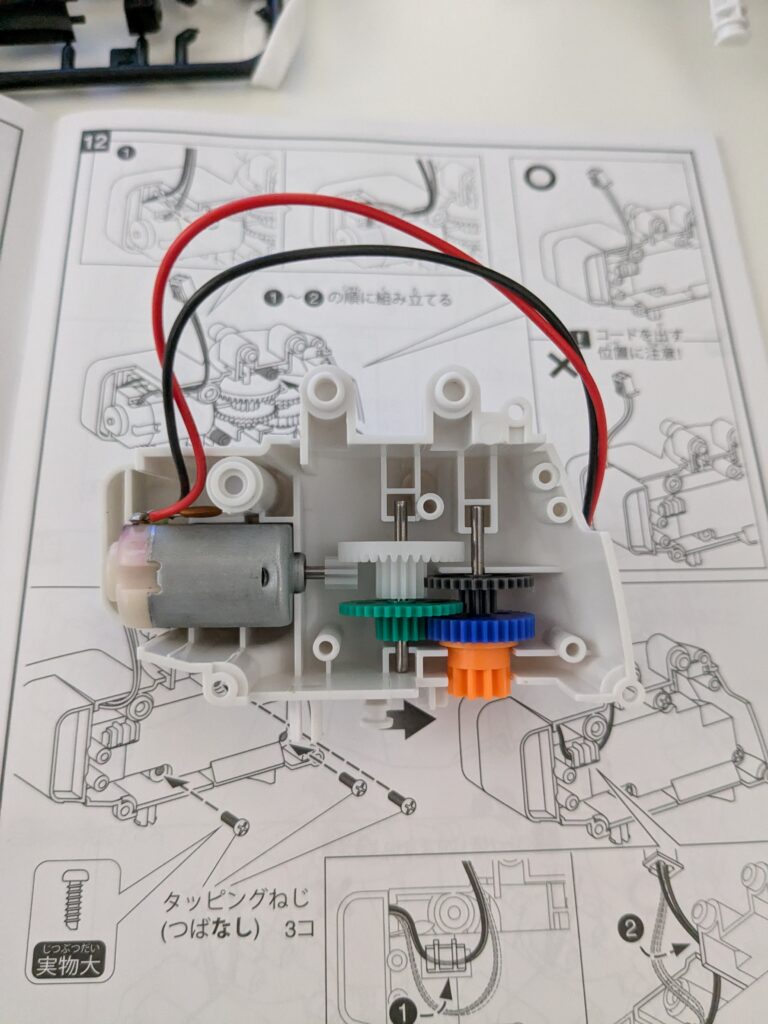
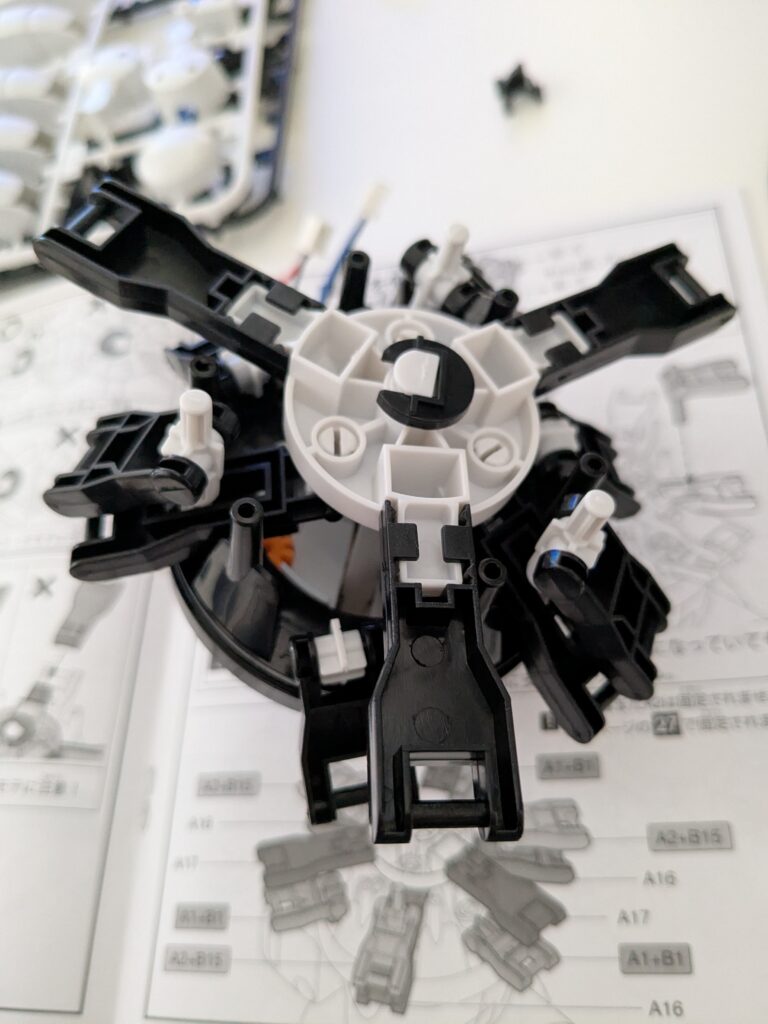
ギアボックス組立
ギアの組み合わせを間違えると動かなくなってしまいます。
ギアごとに色分けがされているので、説明書を見ながら正しい組み合わせで組み立てましょう。
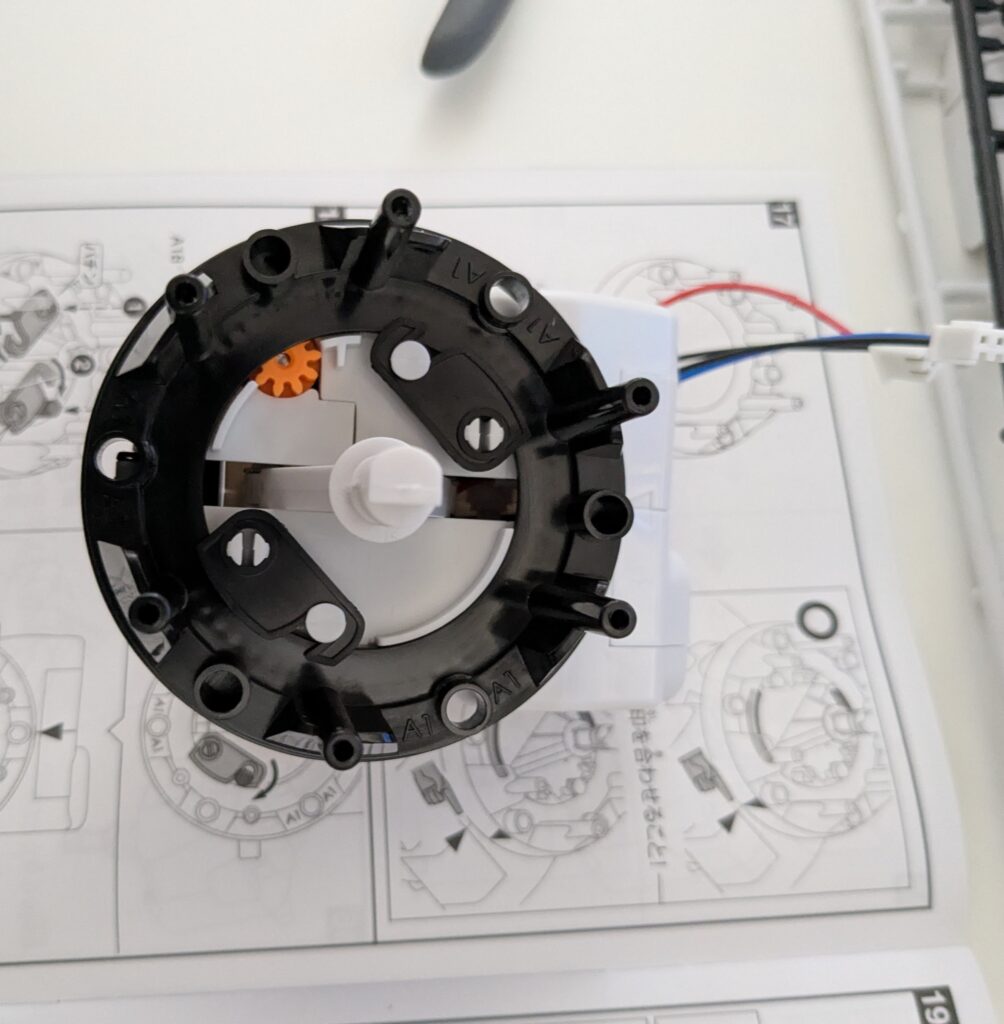
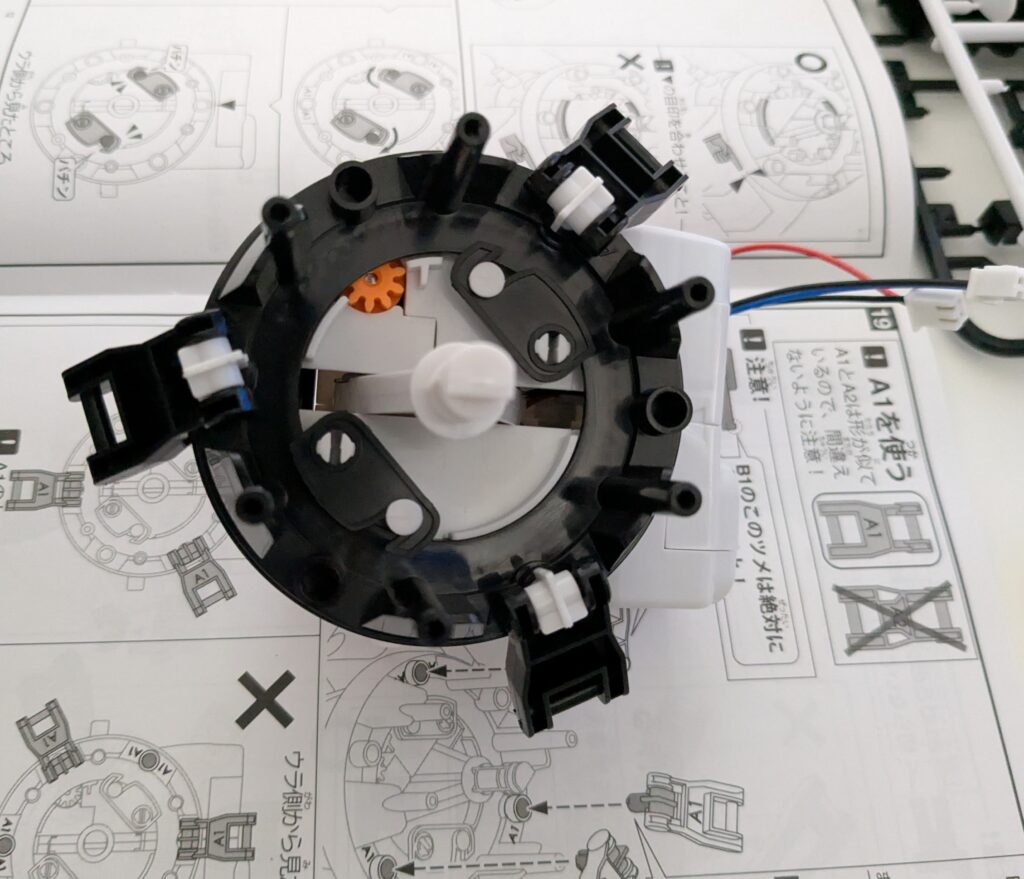
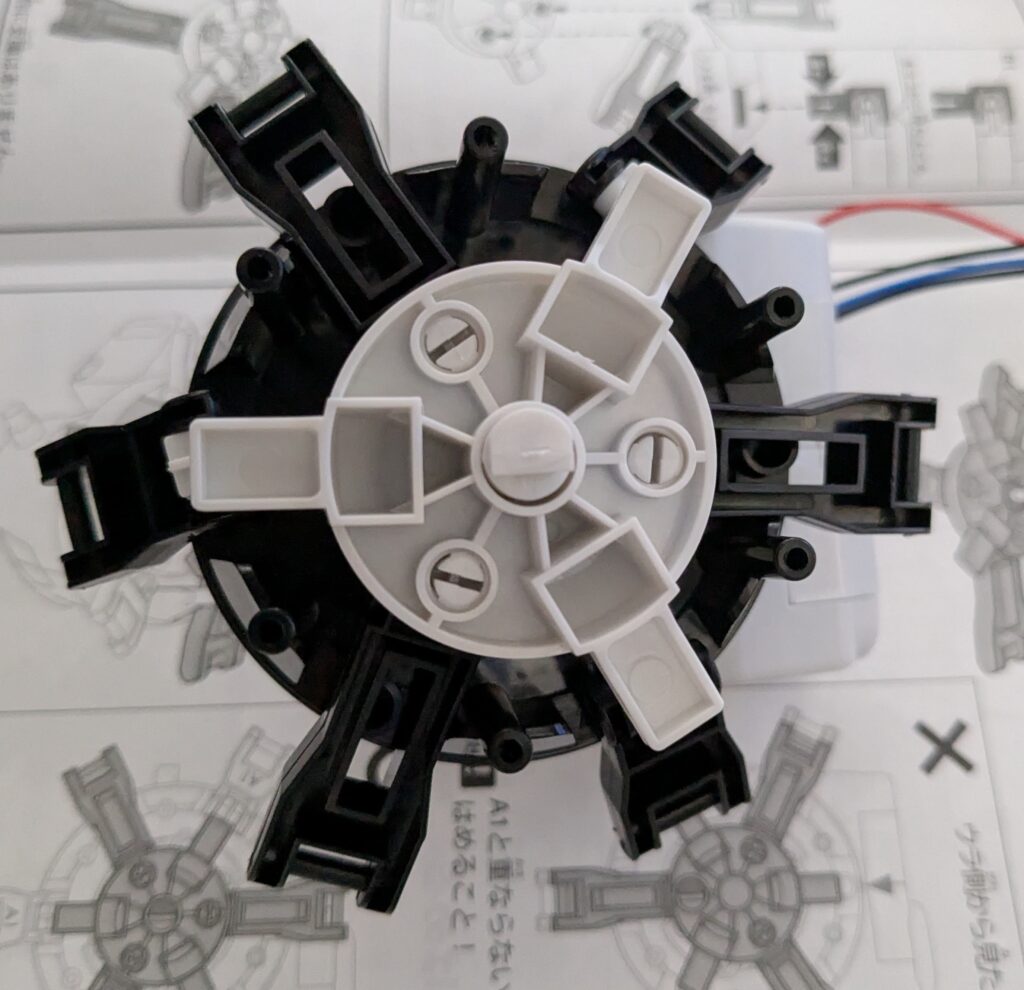
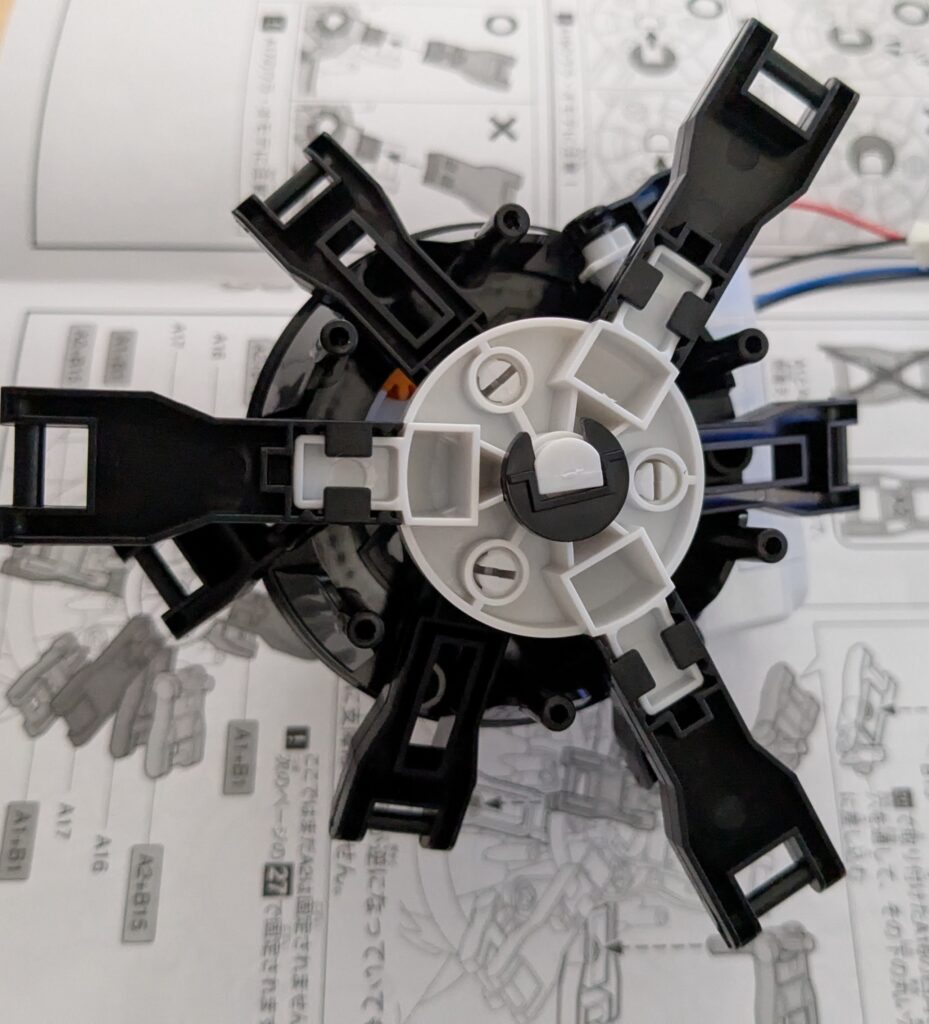
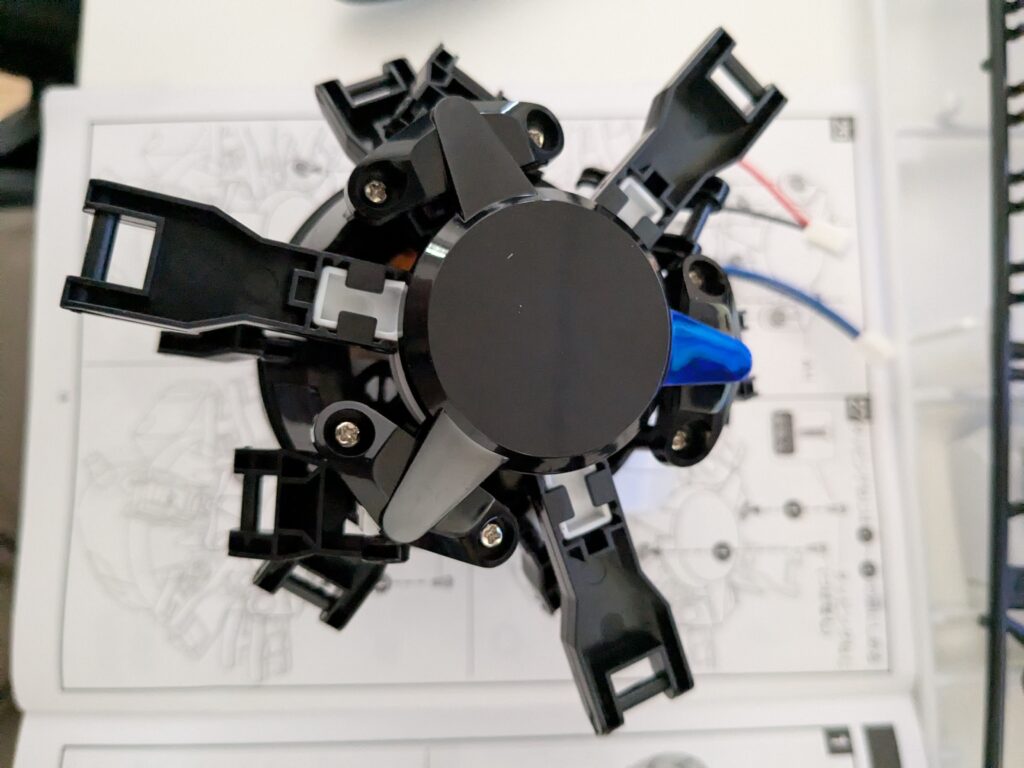
胴体+6本足の組立
同じような部品が出てくるので、向きや種類を間違えないようにしましょう。
部品のはめ込みに多少の力が必要なところがあるので、部品を割らないように注意が必要です。
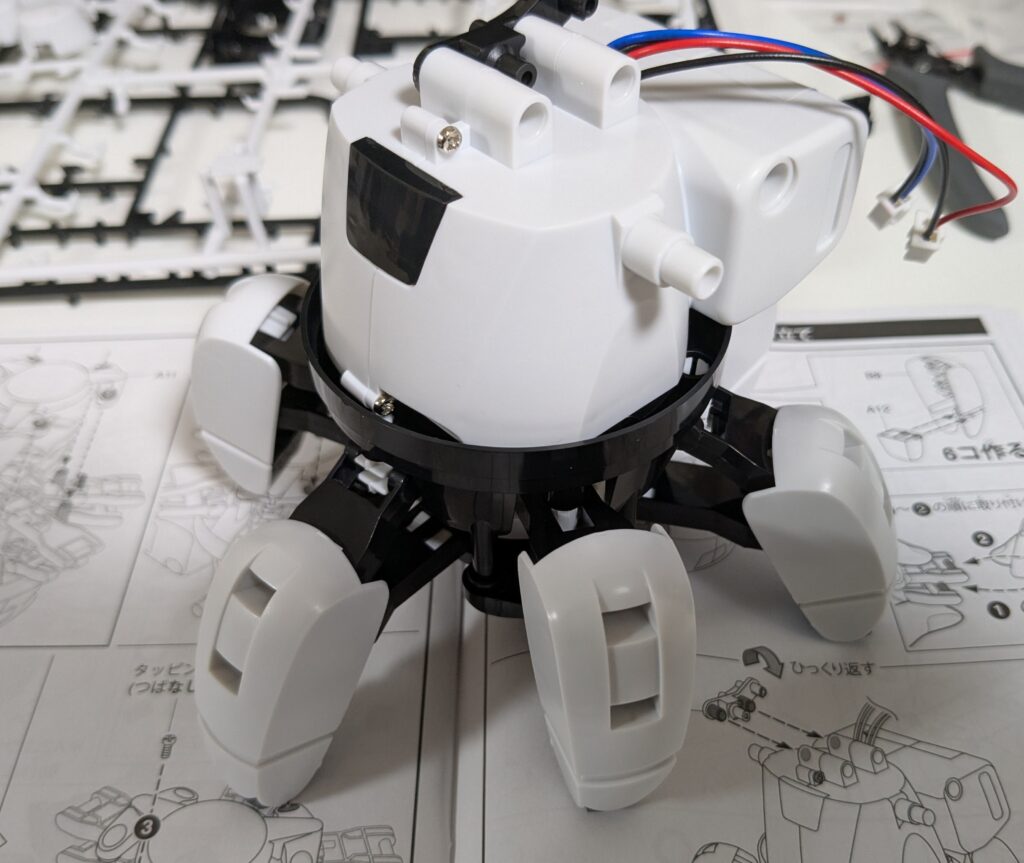
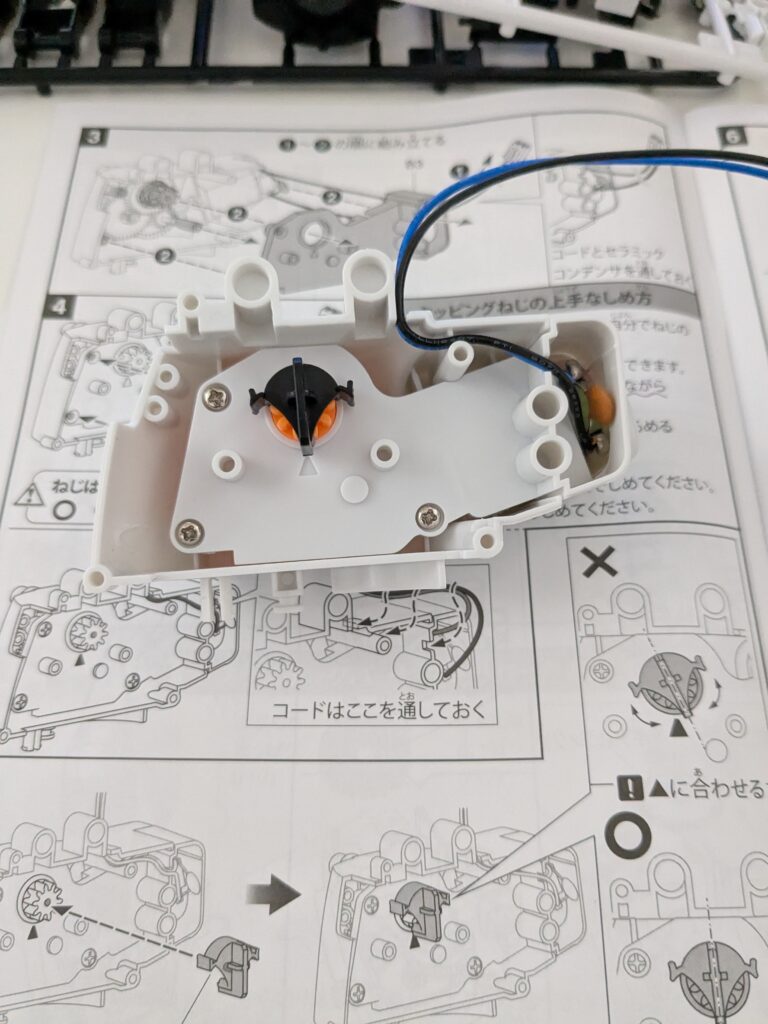
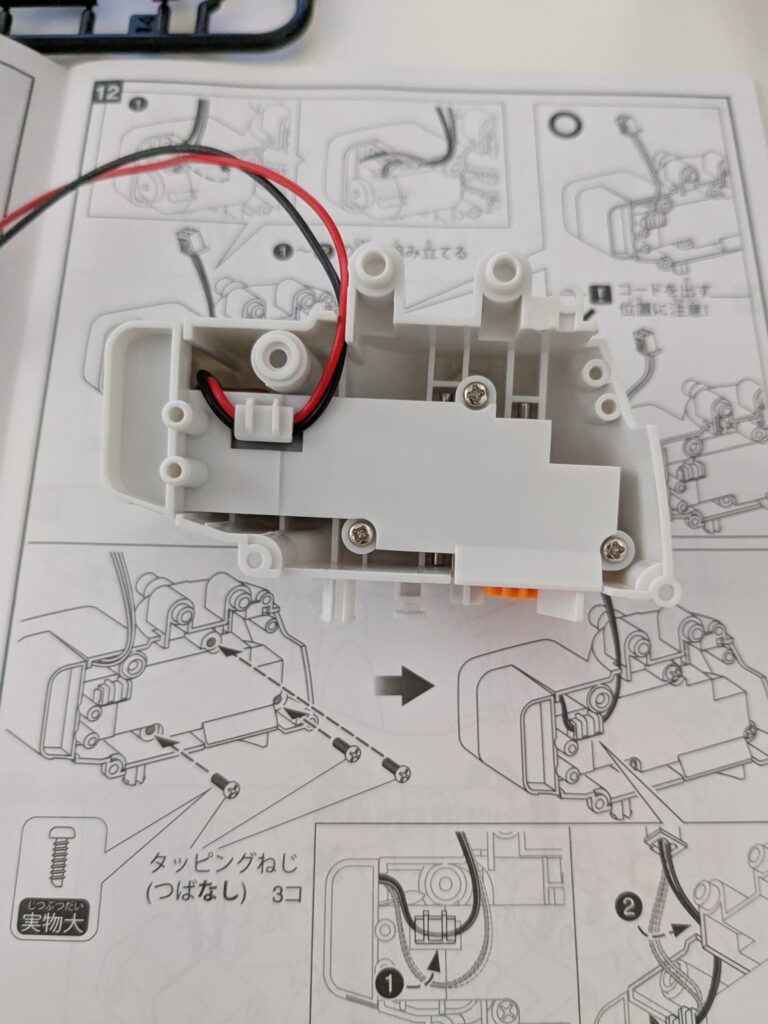
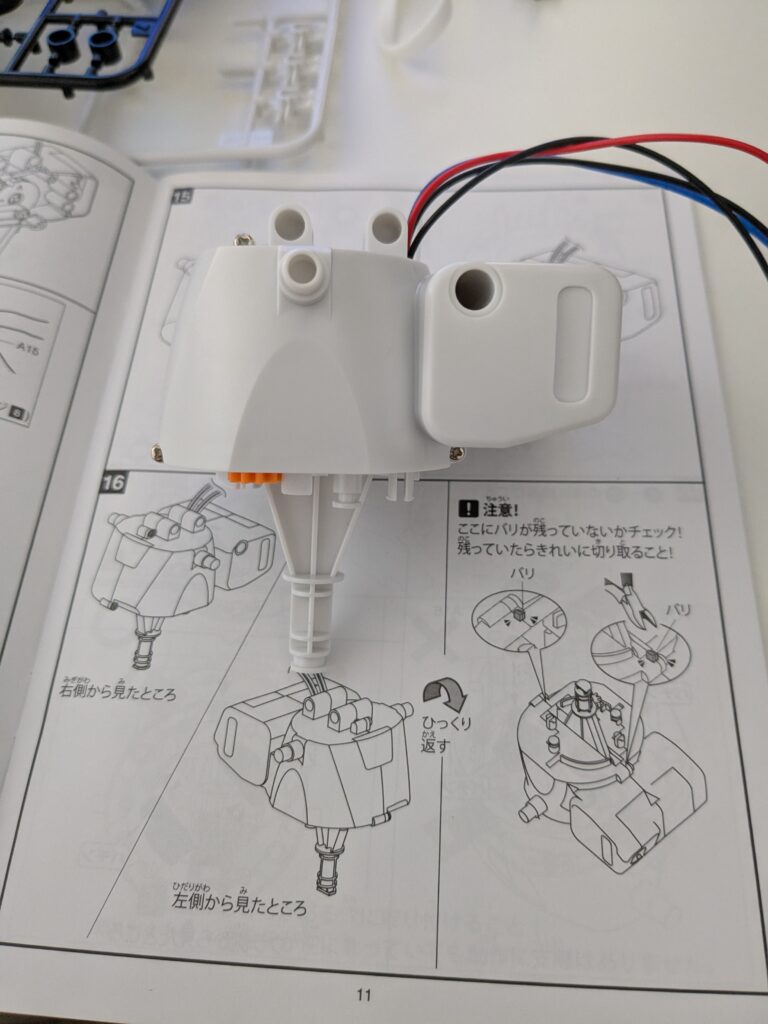
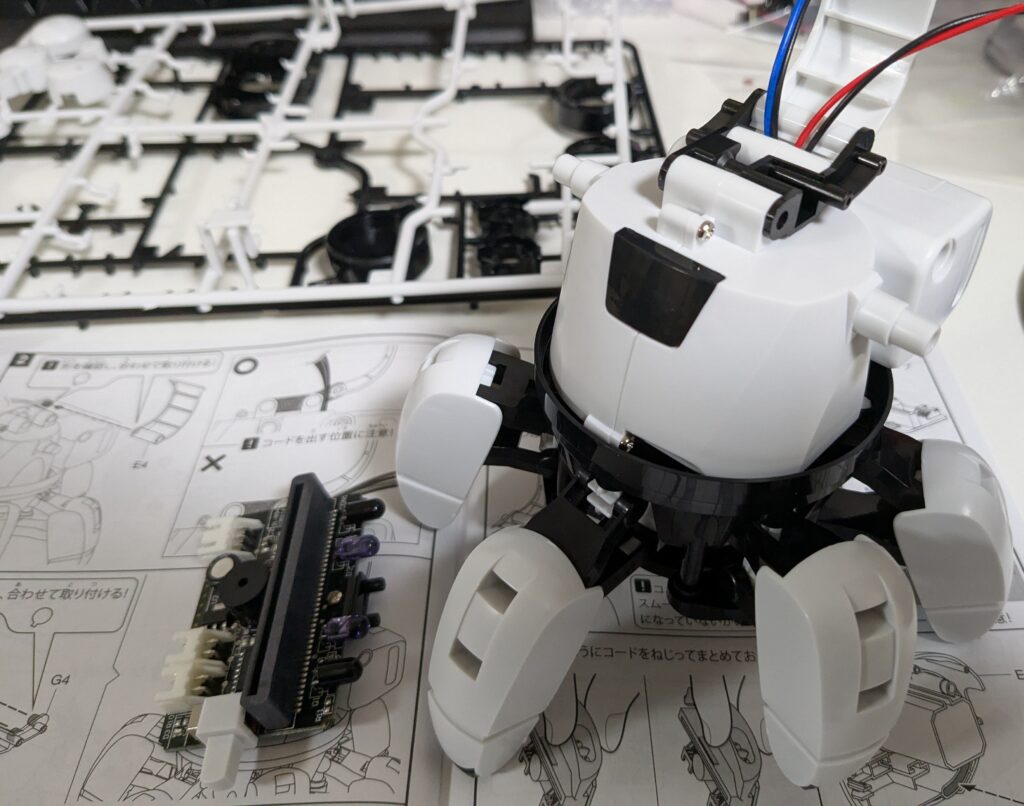
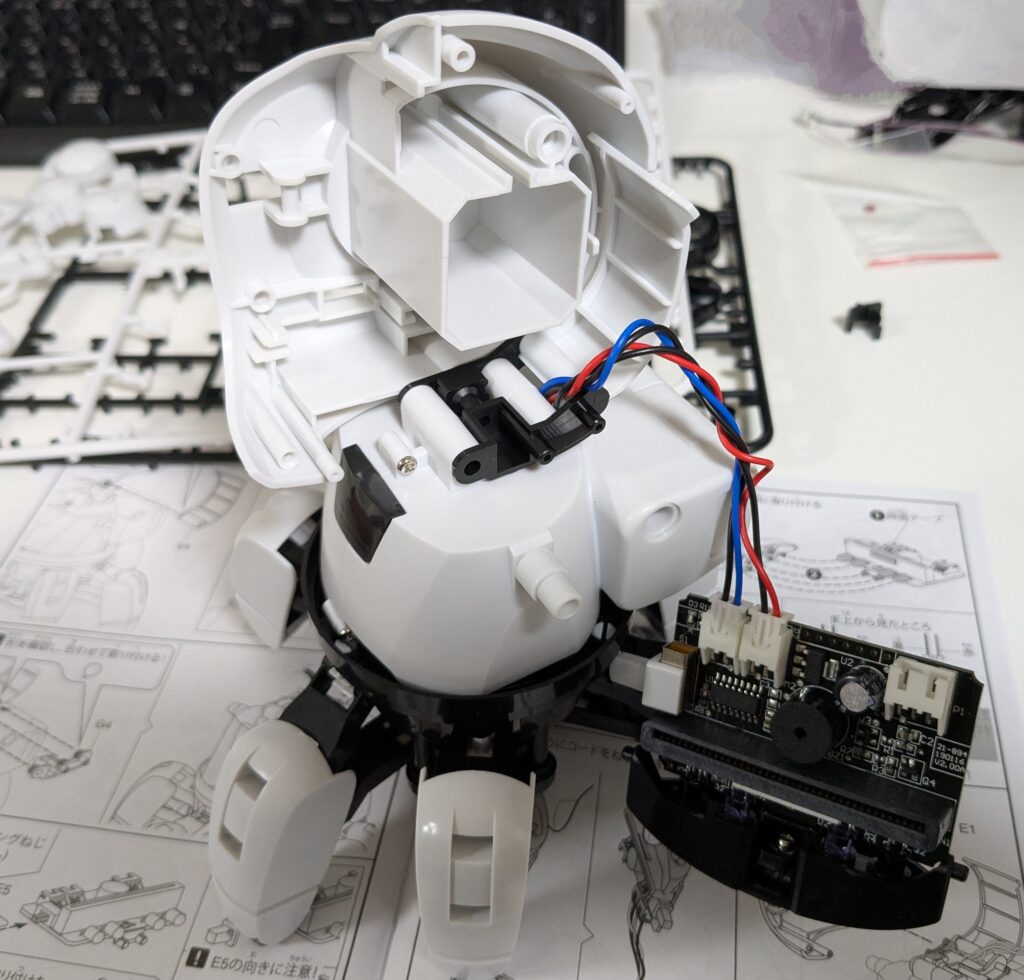
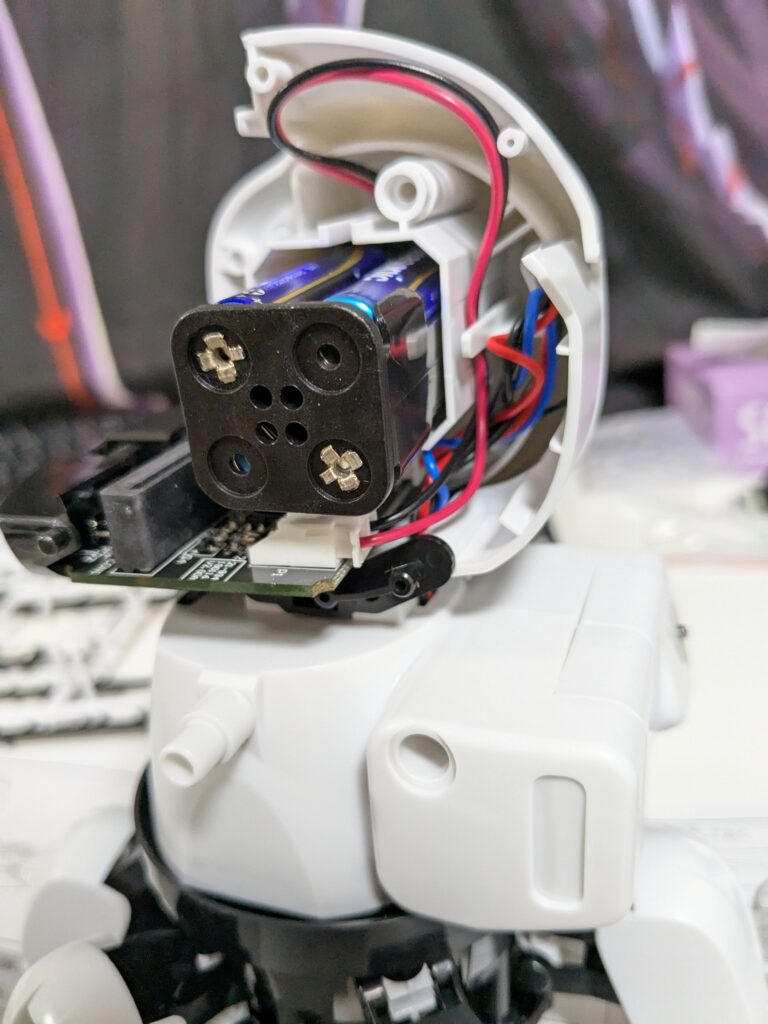
頭部組立~完成まで
電池ボックスや基板の取り付けを行います。
ケーブルの取り回しは以下の写真が参考になれば幸いです。




動作確認用プログラムで動作確認
プログラミングフォロには、あらかじめ動作確認用プログラムが転送されているので、そちらを使って動作確認を行います。
探索モード
赤外線センサーで障害物を検知し、回避しながら前進します。
前方に障害物がない限り、前進し続けます。
追跡モード
赤外線センサーで前方に物体を検知すると、物体の方に向かって前進します。
前方に物体がないとき(赤外線センサーが反応していない)ときは停止します。
まとめ
「プログラミングフォロ」は、組み立てるだけでもワクワクがいっぱいのロボット教材です。
最初から用意されているプログラムで、すぐにロボットの動きを楽しめるのも嬉しいポイント。
次回はいよいよ自分だけのプログラムを作って、プログラミングフォロを自由自在に動かしてみたいと思います!


コメント